
Adafruit 9-DOF Absolute Orientation IMU Fusion Breakout - BNO055 - QT / Qwiic ESCUDO DE ARMAS
40,73 €
Avísame cuando el artículo esté disponible.
- Descripción
- Información Adicional
- Caracteristicas
Descripción
Si alguna vez ordenó y conectó un sensor de 9 DOF, es probable que también se haya dado cuenta del desafío de convertir los datos del sensor de un acelerómetro, giroscopio y magnetómetro en una "orientación espacial 3D" real. La orientación es un problema difícil de resolver. Los algoritmos de fusión de sensores (la salsa secreta that combina datos de acelerómetro, magnetómetro y giroscopio en una salida de orientación estable de tres ejes) puede ser abrumadoramente difícil de hacer bien e implementar en sistemas de tiempo real de bajo costo.
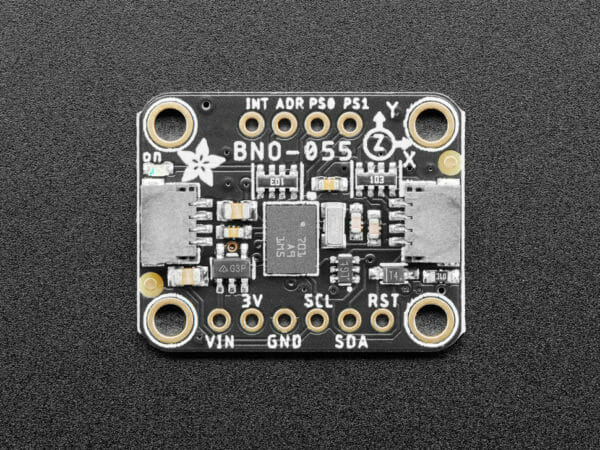
Bosch es la primera empresa en hacer esto bien al tomar un acelerómetro, un magnetómetro y un giroscopio MEMS y colocarlos en un solo dado con un procesador basado en ARM Cortex-M0 de alta velocidad para digerir todos los datos del sensor, abstraer la fusión del sensor y Los requisitos en tiempo real desaparecen y arroja datos que puede usar en cuaterniones, ángulos de Euler o vectores.
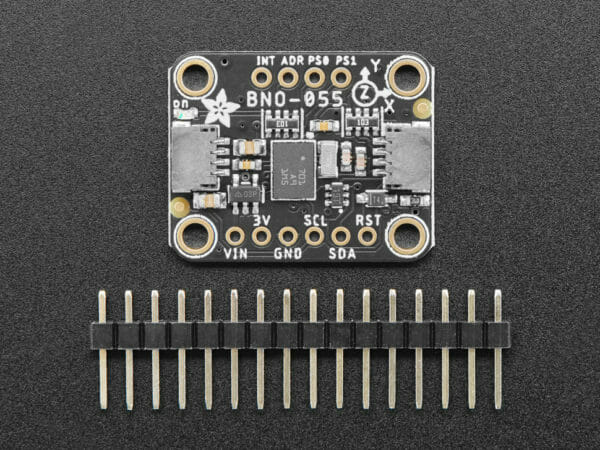
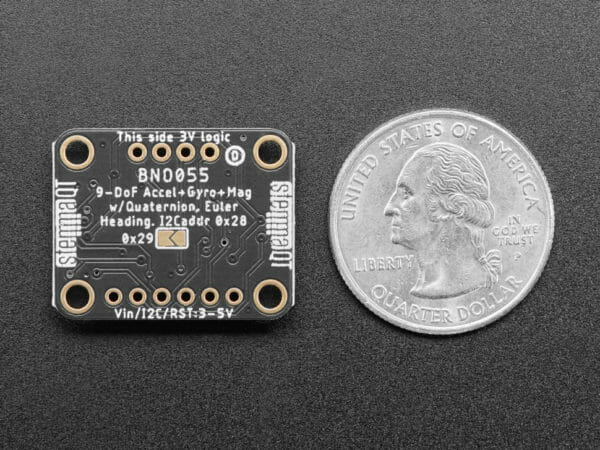
He aquí el Adafruit 9-DOF Absolute Orientation IMU Fusion Breakout - BNO055 en formato QT de escudo de armas. También tenemos este desglose en forma y tamaño sin tallo.. El uso es idéntico entre los dos brotes.: la misma biblioteca y software funcionarán en ambos. La versión QT es un poco más pequeña y tiene plug-and-play I2C Conectores en ambos lados para usos que no requieren soldadura. El cable QT no está incluido, pero tenemos una variedad en la tienda.
En lugar de pasar semanas o meses jugando con algoritmos de diversa precisión y complejidad, puede tener datos de sensor significativos en minutos gracias al BNO055, un sensor inteligente de 9 DOF that ¡El sensor se fusiona por sí solo! Puedes leer los datos directamente I2C y el tío de Bob.
El BNO055 puede emitir los siguientes datos del sensor:
- Orientación absoluta (Vector de Euler, 100Hz) Datos de orientación de tres ejes basados en una esfera 360 °
- Orientación absoluta (Cuaternión, 100 Hz) Salida de cuaternión de cuatro puntos para una manipulación de datos más precisa
- Vector de velocidad angular (100Hz) Tres ejes de 'velocidad de rotación' en rad / s
- Vector de aceleración (100Hz) Tres ejes de aceleración (gravedad + movimiento lineal) en m / s ^ 2
- Vector de fuerza de campo magnético (20Hz) Tres ejes de detección de campo magnético en micro Tesla (uT)
- Vector de aceleración lineal (100Hz) Tres ejes de datos de aceleración lineal (aceleración menos gravedad) en m / s ^ 2
- Vector de gravedad (100Hz) Tres ejes de aceleración gravitacional (menos cualquier movimiento) en m / s ^ 2
- Temperatura (1Hz) Temperatura ambiente en grados celsius
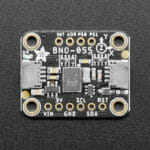
El uso es simple, con I2C apoyo that es seguro con lógica de 3 o 5 voltios. También separamos los pines de interrupción y los puentes de selección de direcciones en case quieres dos BNO-055 en uno I2C autobús. Tenemos bibliotecas Arduino (C / C ++) y CircuitPython disponibles para que pueda usarlas con cualquier microcontrolador o placa de computadora y obtener lecturas de datos en menos de 5 minutos. Cuatro orificios de montaje permiten una conexión segura.
Además, dado que habla I2C puede conectarlo fácilmente con dos cables (¡más energía y tierra!). Incluso hemos incluido SparkFun qwiic compatible STEMMA QT conectores para el I2C bus lo sé ¡ni siquiera necesitas soldar! Use un cable EMBLEM QT plug-and-play para obtener datos de 9 DoF lo antes posible. El cable QT no está incluido, pero tenemos una variedad en la tienda.
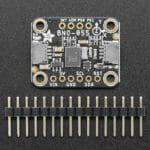
Viene ensamblado y probado, con una pequeña pieza de cabecera. Se requiere algo de soldadura para unir el encabezado a la placa de circuito impreso si desea usarlo en una placa de prueba, pero es un trabajo bastante fácil.
Información Adicional
| LA CREACIÓN | Adafruit |
|---|
- Usos I2C dirección 0x28 (predeterminado) o 0x29
- Hoja de datos, archivos PCB EagleCAD y Fritzing disponibles en el tutorial del producto