





Controlador de motor doble TB9051FTG para Raspberry Pi (Ensamblado)
23,00 €
Avísame cuando el artículo esté disponible.
- Descripción
- Información Adicional
Descripción
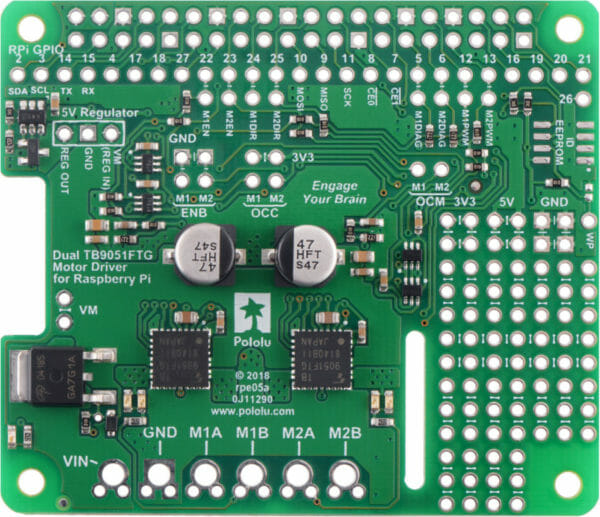
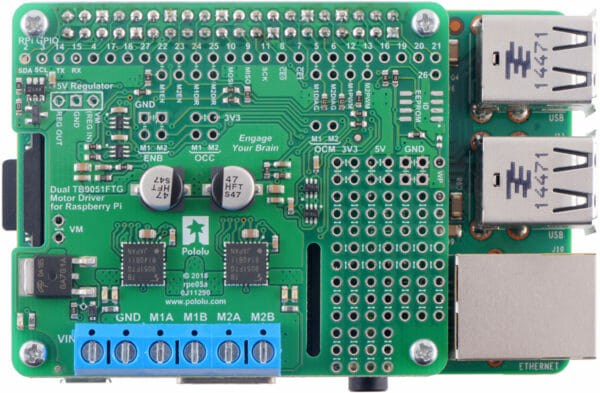
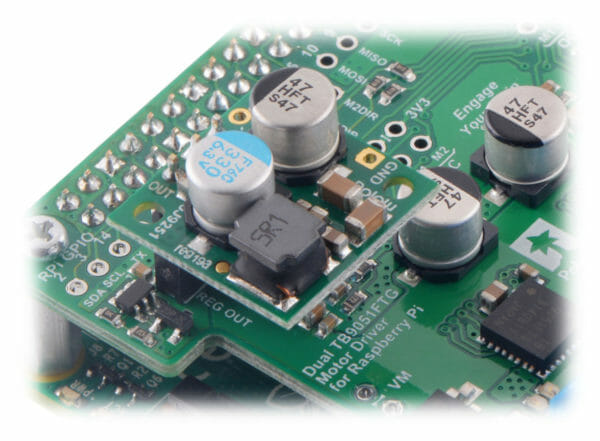
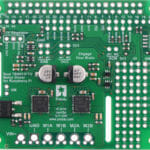
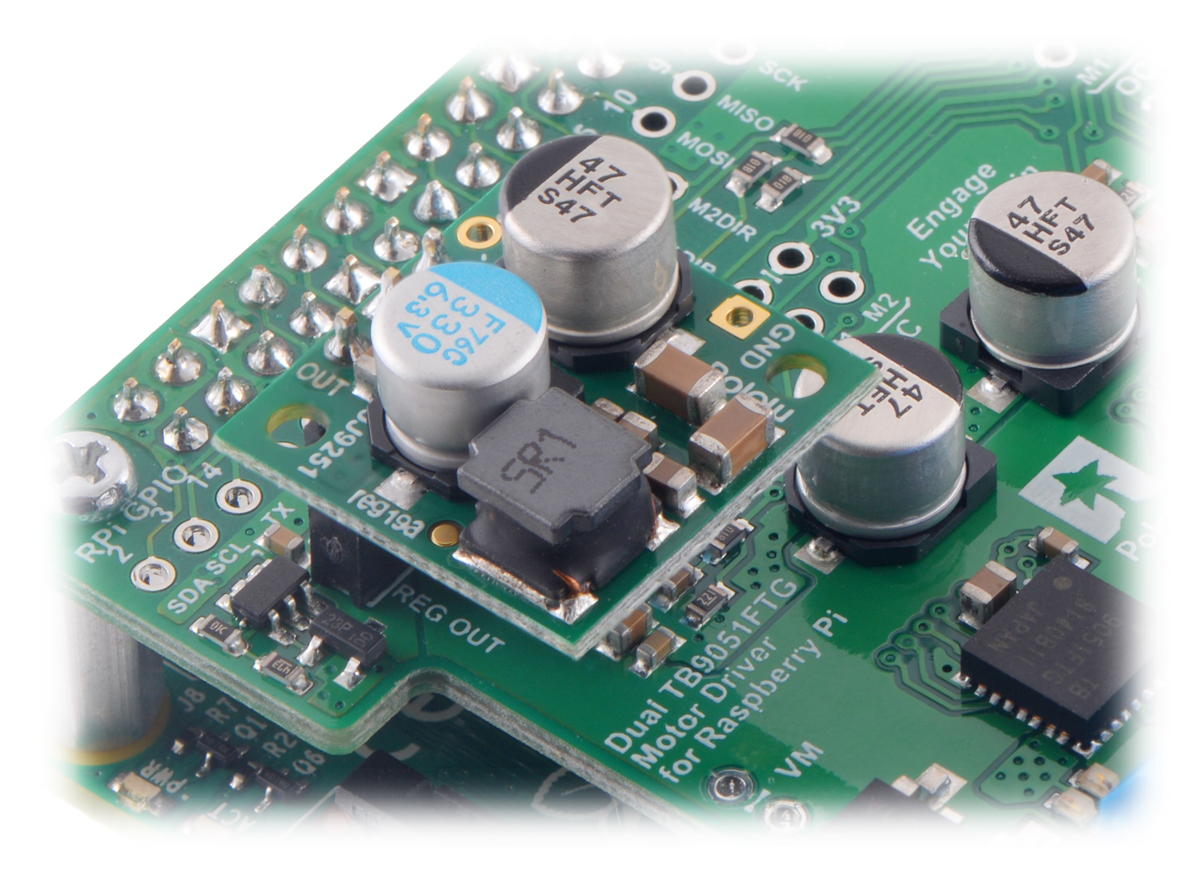
Esta placa complementaria permite Raspberry Pi B +, Pi A +, Pi 2 o Pi 3 para impulsar un par de motores de CC cepillados. Sus controladores de motor dobles TB9051FTG operan de 4.5 V a 28 V y pueden entregar 2.6 A continuos (5 A pico) por motor. Las asignaciones de pines predeterminadas facilitan el uso de nuestro software proporcionado, pero la placa también expone la mayoría de los pines de E / S de los chips del controlador para aplicaciones más especializadas. Esta versión se envía completamente ensamblado con conectores soldados.
Esta placa de expansión de controlador de motor y su biblioteca Python correspondiente facilitan el control de un par de motores de CC cepillados bidireccionales con un Raspberry Pi (Modelo B + o más reciente), incluido el Pi 3 Modelo B + y Modelo A +. La placa de expansión utiliza un par de controladores de motor Toshiba TB9051FTG, que funcionan de 4.5 a 28 V y pueden entregar 2.6 A continuos por canal (hasta 5 A por canal durante unos segundos). Otras características incluyen un circuito de protección de batería inverso y puertas lógicas that Reducir el número de pines de E / S necesarios para controlar los circuitos integrados del controlador de forma eficaz. Está disponible como kit parcial, con un cabezal hembra y bloques de terminales incluidos pero no soldados, o completamente ensamblado con estos conectores soldados a la PCB.
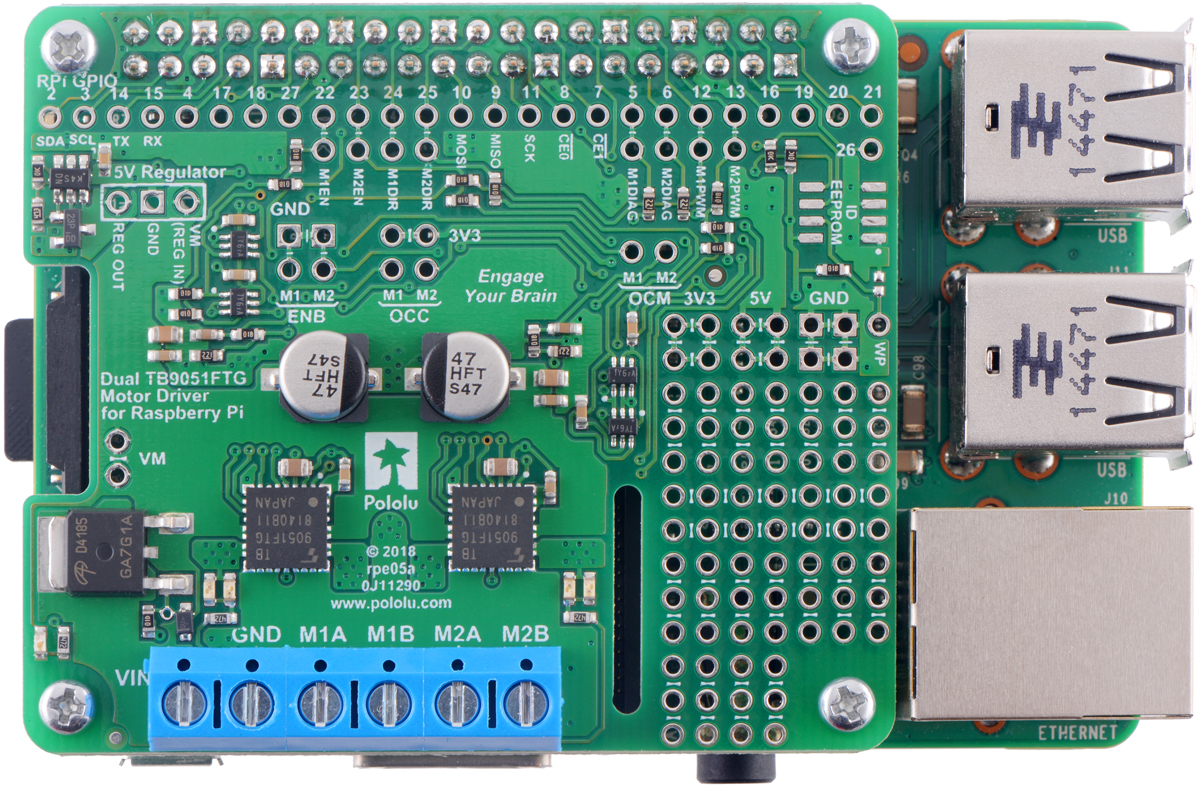
La configuración predeterminada de la placa utiliza seis pines GPIO para controlar los controladores del motor, haciendo uso del Raspberry Pisalidas PWM de hardware, y utiliza dos pines adicionales para leer las salidas de estado de los controladores. Sin embargo, las asignaciones de pines se pueden personalizar si los valores predeterminados no son convenientes, y se puede acceder a otras entradas y salidas de control de los circuitos integrados TB9051FTG en la placa para aplicaciones más avanzadas.
 |
El tablero coincide con el Raspberry Pi HAT (Hardware conectado en la parte superior) especificación mecánica, aunque no se ajusta a la totalidad HAT especificaciones debido a la falta de una ID EEPROM. (Una huella para agregar su propia EEPROM está disponible para aplicaciones donde sería útil; se proporcionan pull-ups en SDA, SCL y WP). no práctico para usar esta placa de expansión con el original Raspberry Pi Modelo A o Modelo B debido a diferencias en su distribución de pines y factor de forma.
Para controlar motores de mayor potencia con Raspberry Pi, considera nuestro Tarjetas de expansión de controlador de motor de alta potencia G2 dual, y para controlar motores de menor potencia con una placa más pequeña, considere nuestro Controlador de motor dual DRV8835 or Controlador de motor dual MAX14870 kits. También tenemos un similar doble escudo TB9051FTG para Arduinos y placas compatibles con Arduino y un básico portador TB9051 único para aquellos que utilizan un controlador diferente o con limitaciones de espacio más estrictas.
Caracteristicas
- Controlador de motor de puente H de doble canal en el factor de forma de un Raspberry Pi tablero de expansión
- Amplio rango de voltaje de funcionamiento: 4.5 V a 28 V
- Corriente de salida: 2.6 A continuo (5 A pico) por motor
- La función de corte de corriente automático ayuda a prevenir el sobrecalentamiento al reducir con elegancia la energía en lugar de apagarse abruptamente
- Funcionamiento PWM de hasta 20 kHz, que es ultrasónico y permite un funcionamiento más silencioso del motor
- Los indicadores LED del motor muestran what las salidas funcionan incluso cuando no hay motor conectado
- La placa puede alimentar opcionalmente Raspberry Pi base a través de un regulador añadido como el D24V10F5 or D24V22F5 (no incluido)
- Biblioteca de Python hace que sea fácil comenzar a usar esta placa como una placa de expansión de controlador de motor
- Las asignaciones de pines GPIO se pueden personalizar si las asignaciones predeterminadas no son convenientes
- Los pines restantes del controlador del motor están expuestos para un uso avanzado
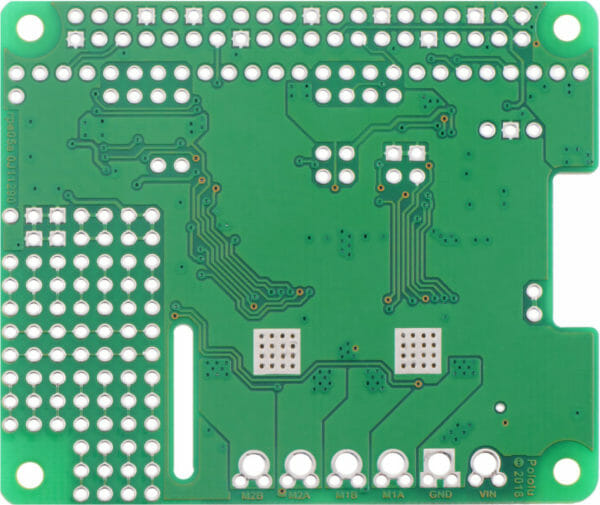
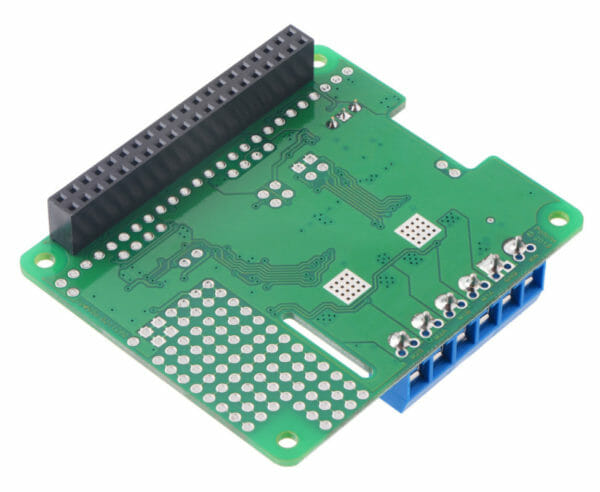
- Almohadillas de tierra soldables expuestas debajo de los circuitos integrados del controlador en la parte inferior de la PCB
- Protección de tensión inversa en la alimentación del motor.
- Conductores robustos:
- Operación transitoria (<500 ms) hasta 40 V
- Bloqueo de bajo voltaje y protección contra sobrecorriente / cortocircuito y sobrecalentamiento
- La salida de error activo bajo indica una condición de sobrecorriente, sobrecalentamiento, bajo voltaje o sobrevoltaje de VCC
- Espacio de creación de prototipos para una construcción más fácil y limpia de circuitos personalizados
Detalles para el articulo #2762
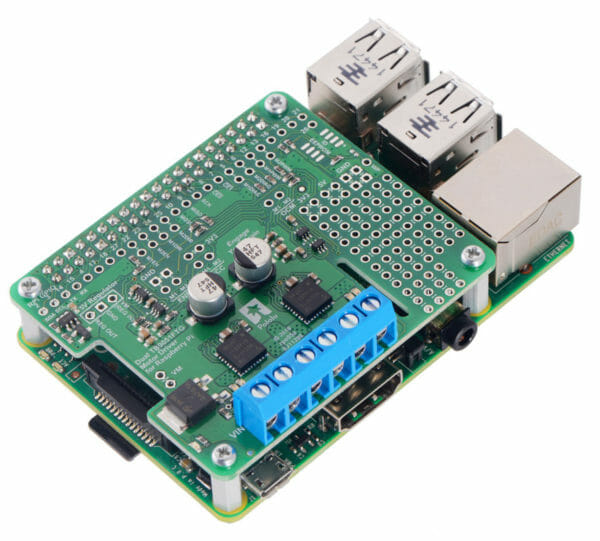
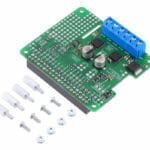
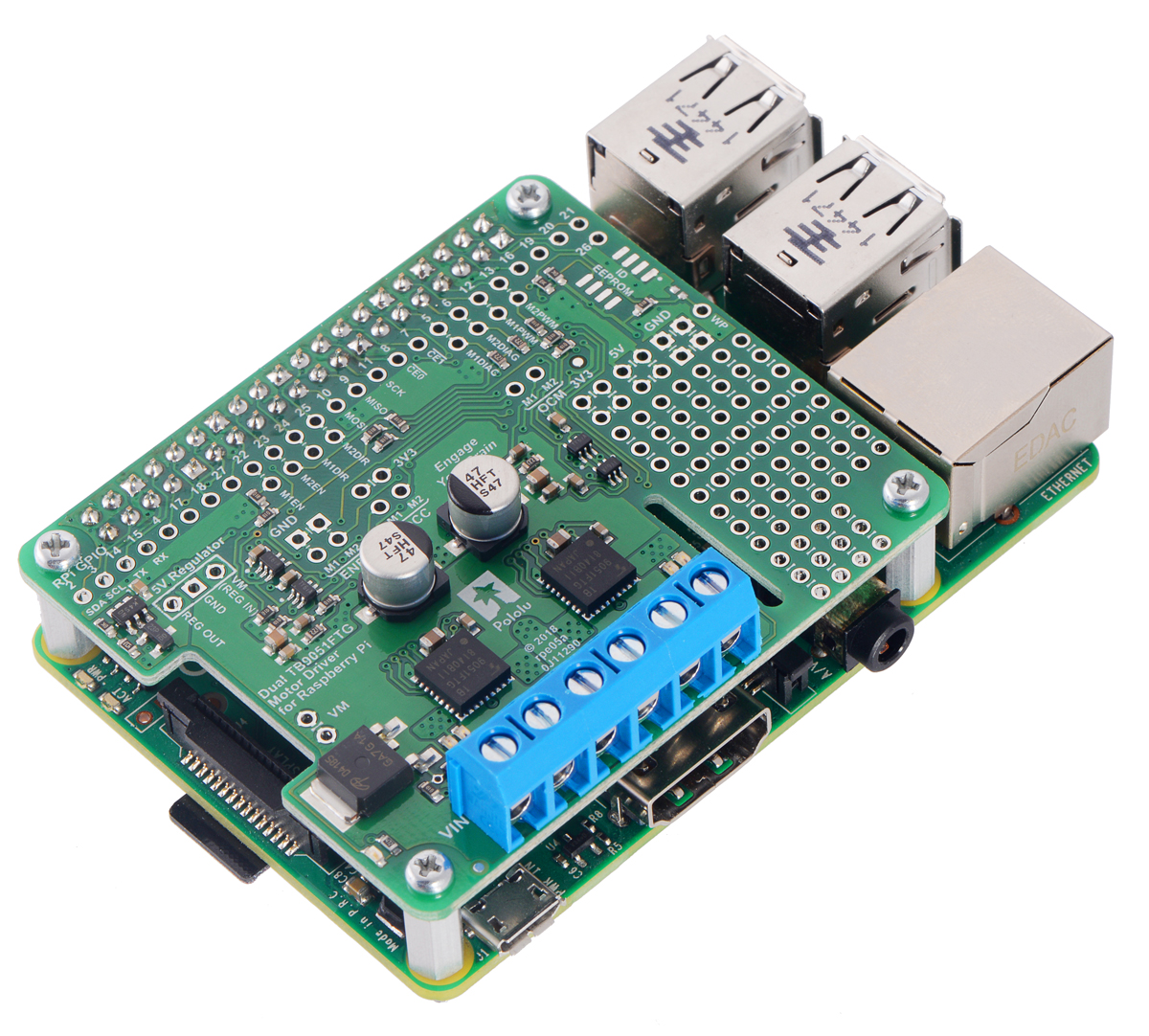
Esta versión del controlador de motor es completamente ensamblado, Con un 2 × 20 pines 0.1 ″ encabezado hembra (para conectarse al Raspberry Piencabezado GPIO de 40 pines) y una tira de seis pines de Bloques de terminales de 5 mm (para motor y conexiones de potencia) soldado en. (Si es Artículo n.o 2761 para una versión de kit con conectores incluidos pero no soldados)
 |
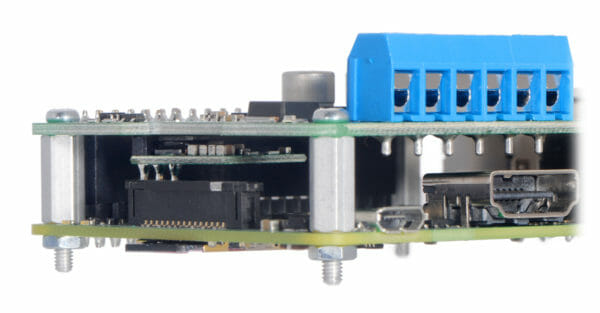
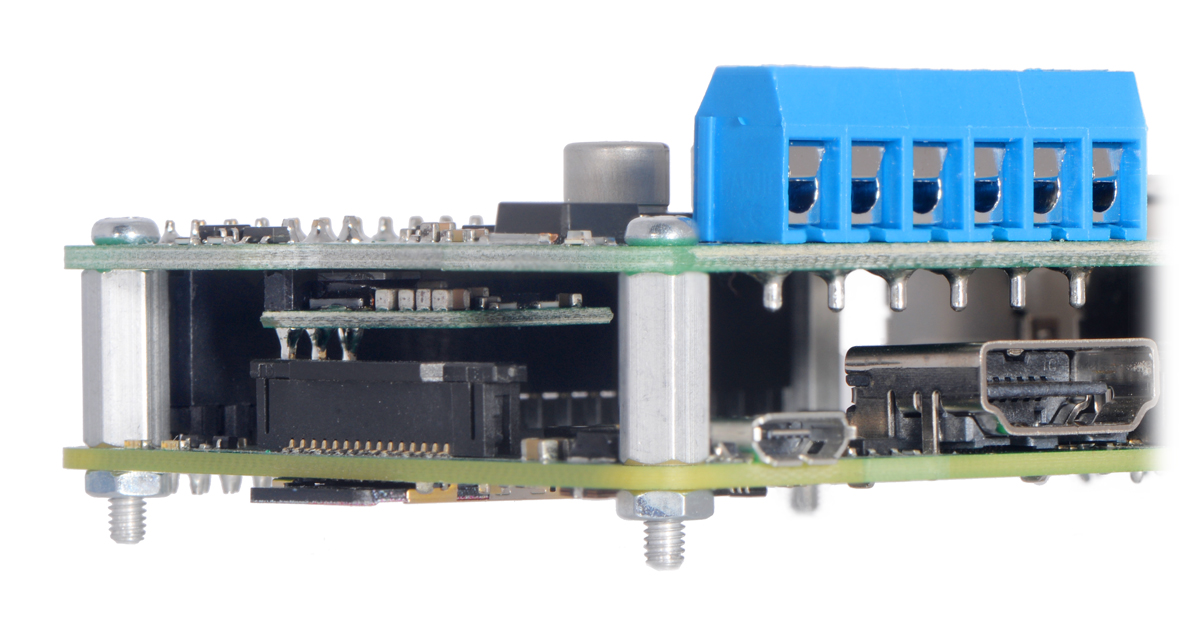
El controlador del motor se envía con un juego de cuatro Separadores de M2.5 (11 mm de longitud), tornillosy frutos secos that se puede utilizar para asegurar la placa a la Raspberry Pi a la altura adecuada para el conector GPIO. Si decide no utilizar los separadores, tenga cuidado de no permitir que el motor y las conexiones de Raspberry Piconector HDMI de.
Bloques de cortocircuito y 0.1 ″ mal encabezados (no incluido) se puede utilizar para realizar algunas de las modificaciones opcionales más avanzadas en la placa, como reasignar los pines de control.
A Raspberry Pi is no incluido.
Uso de la placa del controlador del motor
Esta sección explica cómo utilizar la placa complementaria de controlador de motor dual TB9051FTG y proporciona información básica sobre los pines del controlador de motor para ayudarlo a comenzar. Sin embargo, le recomendamos encarecidamente que consulte el Hoja de datos de TB9051FTG (Pdf de 2 MB) para obtener descripciones detalladas de los pines, tablas de verdad y características eléctricas. Esta placa de expansión es esencialmente una placa de conexión para dos circuitos integrados de controlador de motor TB9051FTG con circuitos lógicos adicionales para simplificar el control del motor, por lo que la hoja de datos es su mejor recurso para responder preguntas que no se tratan aquí.
 |
En el estado predeterminado de la placa, las salidas del controlador del motor y el Raspberry Pi se alimentan por separado, aunque comparten un terreno común. Las fuentes lógicas de 3.3 V y 5 V de la placa las proporciona el Raspberry Pi. Cuando se usa de esta manera, el Raspberry Pi debe alimentarse a través de su receptáculo USB Micro-B, y la placa del controlador del motor debe recibir de 4.5 V a 28 V a través de sus grandes almohadillas VIN y GND. Sin embargo, la placa del controlador del motor proporciona un conjunto de tres orificios pasantes donde puede conectar convenientemente un regulador de voltaje apropiado, lo que permite que el suministro del motor también alimente el Raspberry Pi (Véase el Alimentando el Raspberry Pi desde la placa del controlador del motor sección abajo).
Un circuito de protección de voltaje inverso ayuda a prevenir daños a la placa en case la fuente de alimentación del motor está conectada al revés. Se puede acceder al voltaje de entrada con protección inversa para su uso en otros circuitos a través de los dos pines etiquetados como VM en el lado izquierdo de la placa.
La placa incluye puertas lógicas that habilite la operación de accionamiento / freno de los controladores TB9051FTG con solo dos pines de control por motor (PWM y dirección). Dado que la operación de accionamiento / freno generalmente proporciona una relación más lineal entre el ciclo de trabajo de PWM y la velocidad del motor que la operación de accionamiento / inercia, generalmente recomendamos utilizar la operación de accionamiento / freno cuando sea posible.
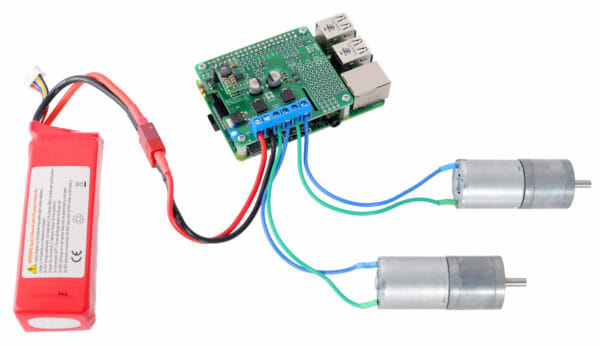
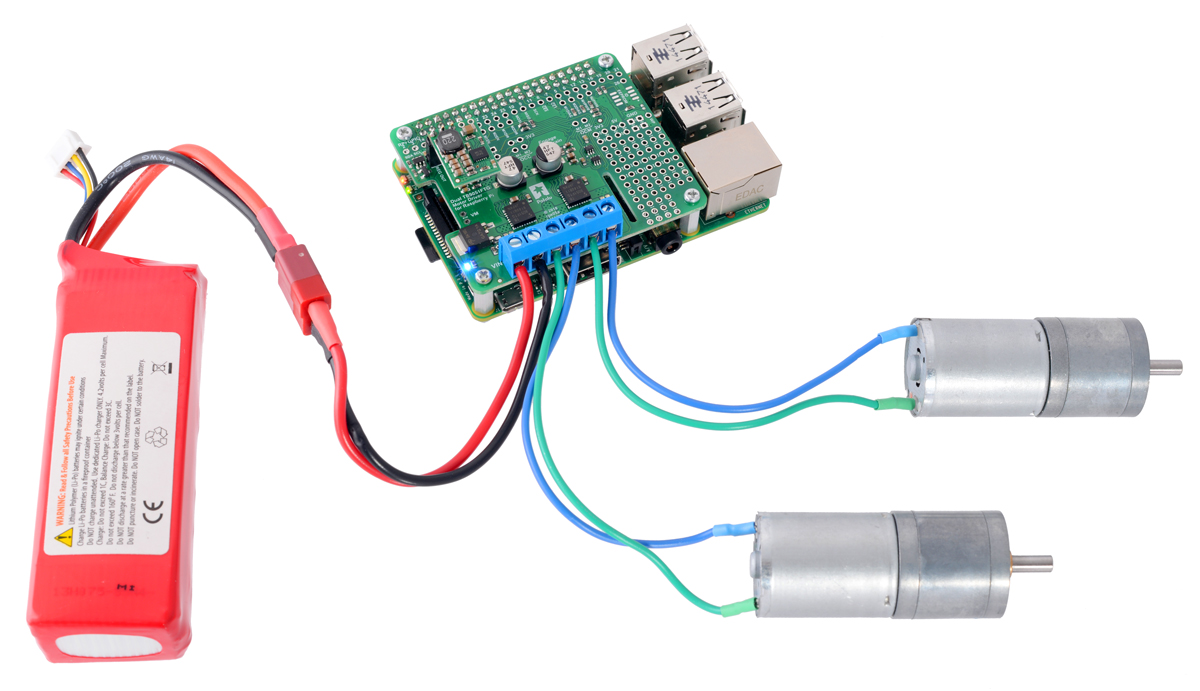 |
| Controlador de motor doble TB9051FTG para Raspberry Pi controlando un par de motores. |
|---|
Asignaciones de pines predeterminadas
Esta tabla muestra cómo Raspberry PiLos pines GPIO se utilizan para interactuar con los controladores del motor:
| RPI Pin GPIO |
Pasador del controlador del motor | Descripción |
|---|---|---|
| 5 | Motor 1 DIAGNÓSTICO | Salida de error de diagnóstico: cuando el controlador funciona normalmente, el Raspberry Pi. En el caso de una falla del controlador, el controlador IC conduce DIAG bajo. Si cualquiera de los pines de desactivación (EN o ENB) está desactivando las salidas, DIAG también será bajo. |
| 6 | Motor 2 DIAGNÓSTICO | |
| 12 | Motor 1PWM | Entrada de velocidad del motor: una señal PWM (modulación de ancho de pulso) en este pin corresponde a una salida PWM en las salidas del motor del controlador correspondiente. Cuando este pin está bajo, el motor frena bajo. Cuando está alto, el motor está encendido. La frecuencia PWM máxima permitida es de 20 kHz. |
| 13 | Motor 2PWM | |
| 22 | Motor 1 ES | Habilitar entrada: El Raspberry Pi baja este pin por defecto, deshabilitando las salidas del motor configurándolas en alta impedancia. EN debe ser elevado para habilitar el controlador del motor. |
| 23 | Motor 2 ES | |
| 24 | Motor 1 dirección | Entrada de dirección del motor: cuando DIR es bajo, la corriente del motor fluye desde la salida A hacia la salida B; cuando DIR es alto, la corriente fluye de B a A. |
| 25 | Motor 2 dirección |
Tabla de verdad de control de motor simplificada
Esta tabla muestra cómo las entradas de control de los controladores afectan las salidas del motor:
| Ingresos | Salidas | ||||
|---|---|---|---|---|---|
| EN | DIR | PWM | MxA | mxB | modo de funcionamiento |
| 1 | 0 | PWM | PWM (H / L) | L | avance / freno a velocidad PWM% |
| 1 | 1 | PWM | L | PWM (H / L) | marcha atrás / freno a la velocidad PWM% |
| 1 | X | 0 | L | L | freno bajo (salidas cortocircuitadas a tierra) |
| 0 | X | X | Z | Z | costa (salidas apagadas) |
Reasignación de pines
Todas las Raspberry PiLos pines GPIO están divididos a lo largo de una fila de orificios pasantes numerados justo debajo del conector GPIO de 40 pines. Cada pin GPIO utilizado por la placa está conectado desde esta fila al pin del controlador del motor correspondiente mediante una traza en la parte superior de la placa que abarca el par de orificios. Si desea reasignar uno de estos pines del controlador del motor, puede cortar su trazo con un cuchillo y luego pasar un cable desde el orificio inferior hasta un nuevo pin GPIO.
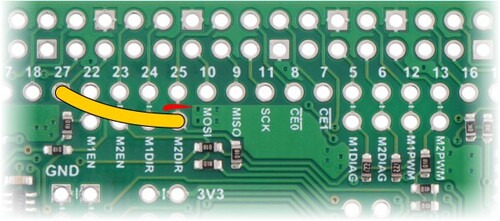 |
| Controlador de motor doble TB9051FTG para Raspberry Pi Ejemplo de reasignación: mover M2DIR del pin 25 de GPIO al pin 27. |
|---|
Notas that se eligieron las asignaciones de pines predeterminadas para que that las Raspberry PiLos pull-ups y pull-ups GPIO predeterminados coinciden con la dirección en la que están o deberían tirarse los pines del controlador del motor (hacia arriba para DIAG, hacia abajo para otros); Si reasigna los pines del controlador del motor sin prestar atención a esto, es posible que tenga problemas con los pines que se tiran de manera incorrecta. Ver el Raspberry Pi documentación para obtener más información sobre los estados GPIO predeterminados.
Uso de pines TB9051FTG adicionales
El resto de las entradas y salidas TB9051FTG no están conectadas al Raspberry Pi, pero son accesibles a través de sus propios orificios pasantes en case desea utilizarlos en una aplicación más avanzada de los controladores de motor. La placa une algunas de las entradas altas o bajas a través de trazas cortables, similar a la forma en que se conectan los pines reasignables, y debe cortar la traza antes de conectar cada entrada a cualquier otra cosa. Esta tabla muestra la configuración predeterminada de los pines adicionales:
| Pasador del controlador del motor | Descripción | Configuración predeterminada a bordo |
|---|---|---|
| ENB | Entrada de habilitación invertida | Atado bajo (habilitado) a través de la traza cortable |
| OCC | Entrada de configuración de respuesta de sobrecorriente | Tirado internamente bajo (el conductor permanece deshabilitado después de una condición de sobrecorriente) |
| OCM | Salida de monitor actual | Conectado a la resistencia de detección y al filtro de paso bajo para dar salida a aprox. 500 mV / A (solo activo mientras se conduce el puente H) a través de un filtro RC integrado |
Para obtener más información sobre estos pines y cómo se pueden utilizar, consulte la Hoja de datos de TB9051FTG (2MB pdf).
Alimentando el Raspberry Pi desde la placa del controlador del motor
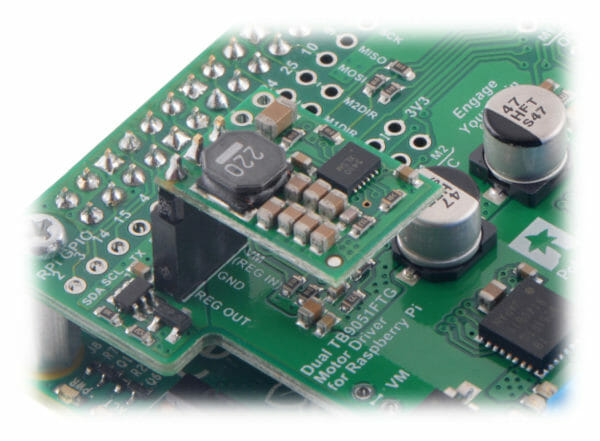
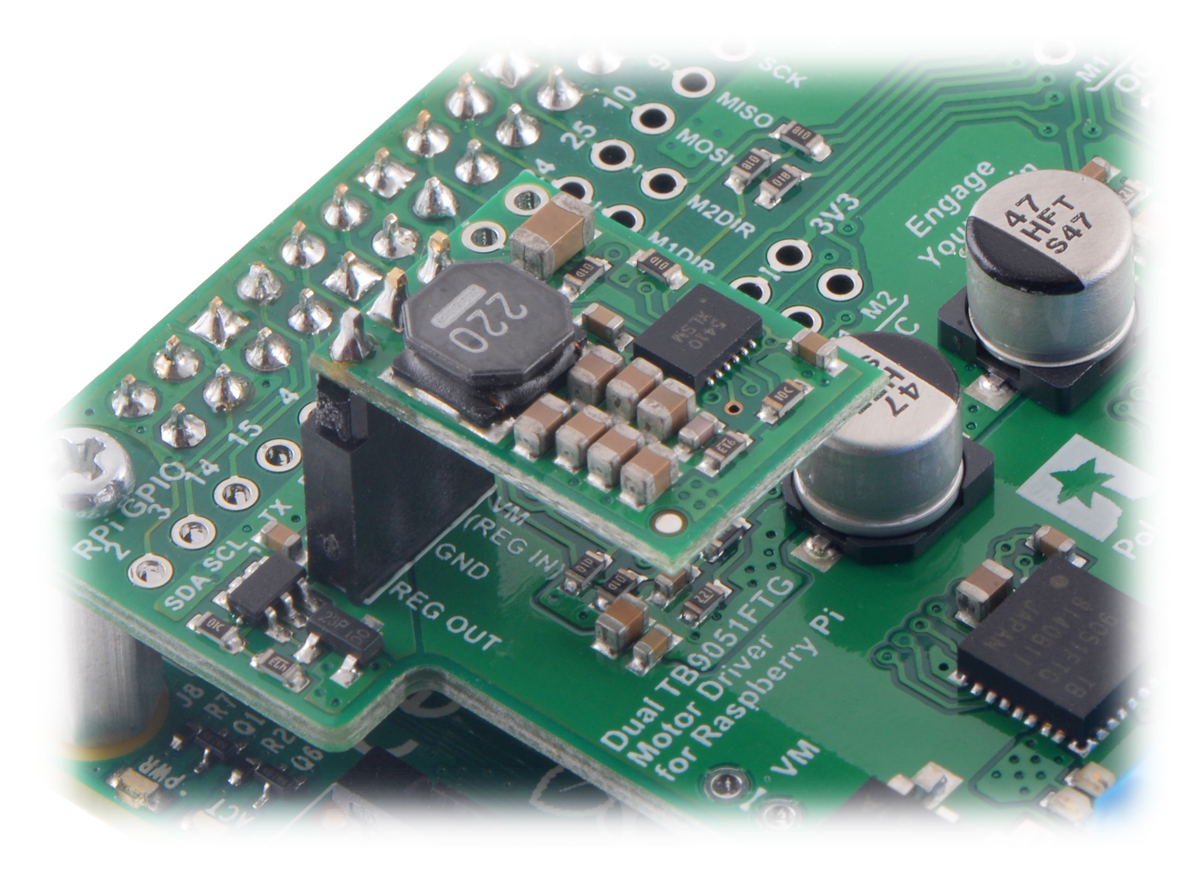
En el lado izquierdo de la placa de expansión hay un conjunto de tres pines rodeados por una caja etiquetada como “Regulador de 5V”. El pin "VM (REG IN)" proporciona acceso al voltaje de suministro del motor de la placa del controlador después de la protección de voltaje inverso, mientras que el pin "REG OUT" está conectado al Raspberry PiRiel de alimentación de 5 V a través de un circuito de diodos ideal. Si se conecta un regulador de voltaje adecuado a estos tres pines, puede generar 5 V para alimentar el Raspberry Pi de la tensión de alimentación del motor de la placa.
Sugerimos utilizar nuestro D24V10F5 or D24V22F5, que funcionan con voltajes de entrada que exceden el máximo de 28 V del TB9051FTG (consulte a continuación para obtener detalles sobre cuál elegir), y pueden suministrar hasta 500 mA o 1 A de corriente, respectivamente, al Raspberry Pi.
Al agregar un regulador de voltaje a la placa del controlador del motor, tenga cuidado de orientarlo correctamente: nota that El pin “VM (REG IN)” de la placa del controlador del motor debe conectarse al pin VIN del regulador, mientras que el pin VOUT del regulador debe conectarse al pin REG OUT de la placa del controlador del motor.
Hay algunas consideraciones que se deben tener en cuenta al "respaldar" el Raspberry Pi a través de un regulador de voltaje de esta manera:
- La fuente de alimentación de su motor debe tener un voltaje aceptable tanto para el regulador como para los circuitos integrados del controlador TB9051FTG.
- El regulador debe poder manejar los requisitos de energía del Raspberry Pi. El Modelo B + generalmente usa algunos cientos de miliamperios a 5 V, aunque su consumo de corriente puede exceder 1 A si también suministra energía a dispositivos USB y otros periféricos. Si bien un regulador lineal como un 7805 podría caber en la ubicación de montaje del regulador, podría generar calor excesivo o apagarse a voltajes de entrada y corrientes de salida más altos. Recomendamos utilizar un regulador de conmutación como los mencionados anteriormente.
El circuito de diodo ideal en esta placa evita que la corriente inversa fluya hacia el suministro de 5 V de la placa del controlador del motor si el Raspberry Pi se alimenta por separado (por ejemplo, a través de su receptáculo de alimentación USB). Sin embargo, comenzando con el Raspberry Pi 3 Modelo B +, no hay un circuito de diodo ideal correspondiente en el Raspberry Pientrada de alimentación USB, por lo que es posible que la placa del controlador retroalimente un adaptador de alimentación USB a través del Raspberry Pi. Como resultado, no recomendamos conectar una fuente de alimentación USB externa En el correo electrónico “Su Cuenta de Usuario en su Nuevo Sistema XNUMXCX”. Raspberry Pi mientras se alimenta a través del controlador del motor.
La retroalimentación no es un problema para las personas mayores. Raspberry Pi versiones, que tienen un circuito de diodos en la entrada de alimentación USB. Con Raspberry Pi versiones anteriores al Pi 3 B +, es seguro tener una fuente de alimentación diferente conectada al Raspberry Pi a través de su receptáculo USB mientras el complemento del controlador del motor y el regulador están conectados y alimentados.
El D24V10F5 puede suministrar hasta 1 A de corriente al Raspberry Pi y debería funcionar para modelos de menor potencia (como el A+) con cargas más ligeras. Se puede soldar directamente a la placa del controlador del motor con un encabezado masculino para hacer una conexión compacta y permanente:
|
|

o conectado a un Cabezal hembra de 3 pines soldado a la placa para una configuración más modular:
 |
El D24V22F5 puede suministrar hasta 2.5 A y es más adecuado para un mayor rendimiento Raspberry Pi modelos (como el Pi 3 B +), especialmente con cargas de trabajo exigentes o cuando se alimentan muchos periféricos. Debido a su tamaño más grande, debe conectarse a través de conectores o cables más largos para evitar interferencias con los bloques de terminales.
 |
La página de preguntas frecuentes en el Raspberry Pi El sitio web tiene más información sobre Raspberry Pi requisitos de potencia.
Consideraciones de disipación de poder en el mundo real.
El TB9051FTG comenzará a cortar su corriente de salida en un umbral típico de 6.5 A. Sin embargo, el chip por sí solo se sobrecalentará típicamente a corrientes más bajas. En nuestras pruebas, encontramos that el chip pudo entregar 5 A por solo unos segundos antes de que la protección térmica del chip se activara; una corriente continua de aproximadamente 2.6 A por canal fue sostenible durante muchos minutos sin provocar una limitación de la corriente térmica o un apagado por exceso de temperatura. La corriente real que puede suministrar dependerá de qué tan bien pueda mantener frío el controlador del motor. La placa de circuito impreso del controlador está diseñada para ayudar con esto extrayendo calor del chip del controlador del motor. PWMing el motor introducirá un calentamiento adicional proporcional a la frecuencia.
A diferencia de los puentes H típicos, el TB9051FTG tiene una característica that le permite reducir con gracia el límite máximo de corriente cuando la temperatura del chip se acerca a su límite. Esto significa that Si empuja el chip cerca de su límite, verá menos potencia en el motor, pero podría permitirle evitar un apagado completo.
Este producto puede obtener calientes suficiente para quemarte mucho antes de que el chip se sobrecaliente. Tenga cuidado al manipular este producto y otros componentes conectados a él.
Diagrama esquemático
 |
Este diagrama también está disponible como pdf descargable: Controlador de motor doble TB9051FTG para Raspberry Pi esquemático (269k pdf).
Información Adicional
| LA CREACIÓN | Pololu |
|---|---|
| CATEGORIAS |