


DRV8880 Operador de conductor de pasos
7,32 €
Avísame cuando el artículo esté disponible.
- Descripción
- Información Adicional
Descripción
Este producto es una placa portadora o una placa de conexión para el controlador de motor paso a paso DRV8880 de TI; por lo tanto, recomendamos leer detenidamente la hoja de datos DRV8880 (2 MB pdf) antes de usar este producto. Este controlador de motor paso a paso le permite controlar un motor paso a paso bipolar con una corriente de salida de hasta 1.6 A por bobina (consulte la sección Consideraciones sobre la disipación de energía a continuación para obtener más información). Estas son algunas de las características clave del controlador:
Interfaz de control de dirección y paso simple
Seis resoluciones de pasos diferentes: paso completo, paso medio, paso medio no circular, paso 1 / 4, paso 1 / 8 y paso 1 / 16
Control de salida de corriente ajustable con potencia máxima, que le permite usar voltajes por encima del voltaje nominal de su motor paso a paso para lograr tasas de paso más altas
Entradas digitales para escalar dinámicamente el 25%, 50%, 75% o 100% del límite establecido por el potenciómetro, que le permite reducir el consumo de energía en situaciones donde no se requiere la velocidad máxima o el par
Diez diferentes opciones de modo de decaimiento:
AutoTune (habilitado de forma predeterminada): selecciona automáticamente el modo de decaimiento para cada ciclo de PWM para una regulación de corriente óptima y un rendimiento para la variación del motor y los efectos de envejecimiento
Modos de decaimiento fijos: nueve combinaciones diferentes de decaimiento mixto, rápido y lento en pasos que aumentan o disminuyen
Rango de voltaje de suministro de 6.5 V a 45 V
Regulador incorporado (no se necesita fuente de alimentación lógica externa)
Puede interactuar directamente con sistemas de 3.3 V y 5 V
Apagado térmico por sobrecalentamiento, apagado por sobrecorriente, protección contra cortocircuitos y bloqueo por bajo voltaje
PCB de cobre de 4 capas y 2 oz para una mejor disipación del calor
Almohadilla de tierra soldable expuesta debajo del controlador IC en la parte inferior de la PCB
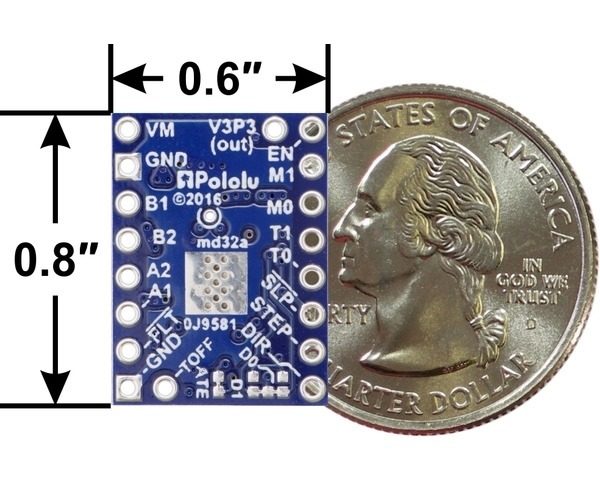
El tamaño del módulo, la distribución de pines y la interfaz coinciden con los de nuestros portadores de controladores de motor paso a paso A4988 en la mayoría de los aspectos (consulte la parte inferior de esta página para obtener más información).
Este producto se envía con todos los componentes de montaje en superficie, incluido el controlador IC DRV8880, instalado como se muestra en la imagen del producto.
Para controladores de motor paso a paso alternativos compatibles con pines, considere nuestro portador DRV8825, portador DRV8824 o portador DRV8834. El DRV8825 puede suministrar más corriente (1.5 A continuos por fase sin refrigeración adicional) y el DRV8834 funciona hasta 2.5 V, lo que lo hace adecuado para aplicaciones de bajo voltaje.
Algunos motores paso a paso unipolares (por ejemplo, aquellos con seis u ocho conductores) pueden ser controlados por este controlador como motores paso a paso bipolares. Para obtener más información, consulte las preguntas frecuentes. Los motores unipolares con cinco cables no se pueden utilizar con este controlador.
Hardware incluido
El portador de controlador de motor paso a paso DRV8880 se envía con un cabezal macho de 1 ″ separable de 18 × 0.1 pines. Los cabezales se pueden soldar para usar con placas de prueba sin soldadura o conectores hembra de 0.1 ″. También puede soldar los cables del motor y otras conexiones directamente a la placa.
Usando el conductor
Diagrama de cableado mínimo para la conexión a un microcontrolador al controlador DRV8880 motor paso a paso (modo 1 / 8-step).
Conexiones de potencia
El controlador requiere una tensión de alimentación del motor de 6.5 V a 45 V para conectarse a través de VMOT y GND. Este suministro debe tener condensadores de desacoplamiento apropiados cerca de la placa y debe ser capaz de entregar la corriente esperada del motor paso a paso.
Una salida de 3.3 V del regulador interno del DRV8880 está disponible en el pin V3P3. Esta salida puede suministrar hasta 10 mA a cargas externas. Cuando el controlador está en modo de suspensión, la salida de 3.3 V está desactivada, por lo que no se puede usar para levantar el pin de suspensión.
Advertencia: esta placa portadora utiliza condensadores cerámicos de baja ESR, lo que la hace susceptible a picos de voltaje LC destructivos, especialmente cuando se utilizan cables de alimentación de más de unas pocas pulgadas. En las condiciones adecuadas, estos picos pueden exceder la clasificación de voltaje máximo de 50 V para el DRV8880 y dañar permanentemente la placa, incluso cuando el voltaje de suministro del motor es tan bajo como 12 V.Una forma de proteger al controlador de tales picos es colocar un condensador electrolítico grande (al menos 47 µF) a través de la potencia del motor (VMOT) y tierra en algún lugar cercano a la placa.
Conexiones de motor
El DRV8880 puede accionar motores paso a paso de cuatro, seis y ocho cables si están conectados correctamente; una respuesta a las preguntas frecuentes explica en detalle el cableado adecuado.
Advertencia: Conectar o desconectar un motor paso a paso mientras el controlador está encendido puede destruirlo. (De manera más general, recablear cualquier cosa mientras está encendido es buscar problemas).
Tamaño de paso (y microstep)
Los motores paso a paso generalmente tienen una especificación de tamaño de paso (por ejemplo, 1.8 ° o 200 pasos por revolución), que se aplica a los pasos completos. Un controlador de microstepping como el DRV8880 permite resoluciones más altas al permitir ubicaciones de pasos intermedios, que se logran energizando las bobinas con niveles de corriente intermedios. Por ejemplo, conducir un motor en modo de cuarto de paso le dará al motor 200-paso-para-revolución 800 microsteps de revolución mediante el uso de cuatro niveles de corriente diferentes.
Las entradas del selector de resolución (tamaño de paso) (M0 y M1) permiten la selección de las resoluciones de seis pasos de acuerdo con la tabla siguiente. M0 es flotante de forma predeterminada, mientras que M1 tiene un 10 k? resistencia pull-down, por lo que dejar estos dos pines de selección de micropasos desconectados da como resultado el modo de 1/8 pasos. Para que los modos de micropasos funcionen correctamente, el límite de corriente debe establecerse lo suficientemente bajo (ver más abajo) para que that se limita la limitación actual. De lo contrario, los niveles de corriente intermedios no se mantendrán correctamente y el motor omitirá los micropasos.
M0
M1
Resolución de microstep
Baja
Baja
Paso completo
Alta
Baja
Medio paso no circular
Baja
Alta
Medio paso
Alta
Alta
Paso 1 / 4
El
Baja
Paso 1 / 8
El
Alta
Paso 1 / 16
Entradas de control
Cada pulso a la entrada STEP corresponde a un micropaso del motor paso a paso en la dirección seleccionada por el pin DIR. Ambas entradas se reducen de forma predeterminada a través de 100 k internos. resistencias desplegables. Si solo desea la rotación en una sola dirección, puede dejar DIR desconectado.
El chip tiene dos entradas diferentes para controlar sus estados de energía: SLEEP y ENABLE. Para obtener detalles sobre estos estados de energía, consulte la hoja de datos. Tenga en cuenta that el conductor jala el pin SLEEP bajo a través de un interno de 100 k? resistencia pull-down, y la placa portadora tira del pin ENABLE hacia arriba a través de una placa de 10 k? resistencia pull-up. El estado SLEEP predeterminado evita que el controlador funcione; este pin debe ser alto para habilitar el controlador (se puede conectar directamente a un voltaje lógico? alto? entre 1.8 y 5.3 V, o se puede controlar dinámicamente conectándolo a una salida digital de un MCU). El estado predeterminado del pin ENABLE es habilitar el controlador, por lo que este pin se puede dejar desconectado.
Esquema de los pines nSLEEP y nFAULT en el transportador DRV8880.
El DRV8880 también presenta una salida FALLO that baja cuando los FET del puente H están deshabilitados como resultado de la protección contra sobrecorriente o apagado térmico, o mientras el bloqueo de subvoltaje está deshabilitando el chip. La placa portadora conecta este pin al pin SLEEP a través de una resistencia de 10k that actúa como un pull-up de FAULT cuando SLEEP se mantiene externamente alto, por lo que no es necesario un pull-up externo en el pin de FAULT. Notas that el portador incluye una resistencia de protección de 1.5k en serie con el pin FAULT that hace que sea seguro conectar este pin directamente a un suministro de voltaje lógico, como podría suceder si usa esta placa en un sistema diseñado para el portador A4988 compatible con pines. En tal sistema, la resistencia de 10k entre SLEEP y FAULT actuaría entonces como un pull-up para SLEEP, haciendo que el portador DRV8880 sea más un reemplazo directo del A4988 en tales sistemas (el A4988 tiene un pull-up interno en su SLEEP alfiler). Para evitar que las fallas bajen el pin SLEEP, cualquier resistencia pull-up externa que agregue a la entrada del pin SLEEP no debe exceder los 4.7k.
El límite actual en el DRV8880 se puede reducir dinámicamente utilizando los pines de escala actuales (TRQ0 y TRQ1) como se muestra en la tabla a continuación. Estos pines se controlan con señales digitales altas y bajas y se pueden usar para escalar la corriente de salida del controlador al 25%, 50%, 75% o 100% del límite de corriente establecido por el voltaje VREF. De manera predeterminada, el escalador actual en el operador DRV8880 está configurado al 100%. (Sistemas destinados a la A4988 that conectar el pin SLEEP del A4988 a RST tendrá un escalador predeterminado del 75%).
TRQ0
TRQ1
Escalador actual
Alta
Alta
25%
Baja
Alta
50%
Alta
Baja
75%
Baja
Baja
100%
El DRV8880 también permite configurar el tiempo de apagado fijo del controlador utilizando el pin TOFF. Este es un pin t de tres estadoshat es flotante de forma predeterminada, lo que da como resultado un tiempo de inactividad fijo predeterminado de 10 s. Bajar este pin cambiará el tiempo de desconexión fijo a 20? S, y subirlo cambiará el tiempo de desconexión fijo a 30 nosotros. Se pueden encontrar más detalles sobre el tiempo de inactividad fijo del conductor en la sección Regulación actual de la hoja de datos del DRV8880.
Puentes opcionales
Por defecto, el operador DRV8880 está configurado para habilitar el autoajuste. En esta configuración, el modo de decaimiento se selecciona automáticamente en cada ciclo PWM (decaimiento lento, rápido o mixto), en función de factores como la resistencia e inductancia del devanado del motor y la velocidad y carga dinámicas del motor. Si se desea un modo de caída diferente, se puede cortar la traza desde el pin de autoajuste (ATE) hasta V3P3 en la parte inferior de la placa y el pin ATE en el puente de montaje en superficie correspondiente (el que está más cerca del borde de la placa) se puede usar para controlar el estado de autoajuste. Además del puente para ATE, también hay puentes de montaje en superficie para los pines de selección del modo de caída (D0 y D1). Estos pines están conectados a tierra por defecto, pero si hay un modo de caída that requiere que uno o ambos pines sean flotantes o se desea alto, las conexiones a tierra existentes se pueden cortar y se puede usar un puente de soldadura para conectar los pines de desintegración a los pads V3P3 por encima de ellos. Para obtener más información sobre los diferentes modos de caída del DRV8880, consulte su hoja de datos.
Limitación de corriente
Para lograr altas velocidades de paso, el suministro del motor es típicamente más alto de lo que sería permisible sin limitación de corriente activa. Por ejemplo, un motor paso a paso típico podría tener una clasificación de corriente máxima de 1 A con un 5? resistencia de la bobina, que indicaría un suministro máximo del motor de 5 V. El uso de un motor de este tipo con 9 V permitiría velocidades de paso más altas, pero la corriente debe limitarse activamente a menos de 1 A para evitar daños al motor.
El DRV8880 admite dicha limitación de corriente activa, y el potenciómetro de ajuste en la placa se puede usar para establecer el límite de corriente. Su motor paso a paso Una forma de poner el controlador en modo de paso completo. El límite de corriente será 0.7 multiplicado por el límite de corriente (ya que ambas bobinas están limitadas a aproximadamente 70% de la configuración del límite de corriente en el modo de paso completo).
Otra forma de establecer el límite de corriente es medir el voltaje en el? Ref? pin y para calcular el límite de corriente resultante (las resistencias de detección de corriente son 0.200?). El voltaje del pin de referencia es accesible en una vía that está encerrado en un círculo en la serigrafía inferior de la placa de circuito. El límite de corriente se relaciona con el voltaje de referencia de la siguiente manera:
Límite de corriente = VREF * TRQ / 1.32
Donde TRQ es el porcentaje de escala actual establecido por los pines TRQ0 y TRQ1. Entonces, por ejemplo, si tiene un motor paso a paso clasificado para 1 A, puede establecer el límite de corriente en 1 A estableciendo el voltaje de referencia en aproximadamente 1.32 V y dejando desconectados los pines de escala de corriente (que están tirados internamente hacia abajo).
Nota: La corriente de la bobina puede ser muy diferente de la corriente de la fuente de alimentación, por lo que no debe utilizar la corriente medida en la fuente de alimentación para establecer el límite de corriente. El lugar apropiado para colocar su medidor de corriente es en serie con una de las bobinas de su motor paso a paso.
Consideraciones de disipación de potencia.
El controlador IC DRV8880 tiene una clasificación de corriente máxima de 2 A por bobina, pero las resistencias de detección de corriente limitan aún más la corriente máxima a 1.6 A, y la corriente real que puede entregar depende de qué tan bien pueda mantener frío el IC. La placa de circuito impreso del portador está diseñada para extraer calor del IC, pero para suministrar más de aproximadamente 1 A por bobina, se requiere un disipador de calor u otro método de enfriamiento.
Este producto puede calentarse lo suficiente como para quemarlo mucho antes de que el chip se sobrecaliente. Tenga cuidado al manipular este producto y otros componentes conectados a él.
Tenga en cuenta that medir el consumo de corriente en la fuente de alimentación generalmente no proporcionará una medida precisa de la corriente de la bobina. Dado que el voltaje de entrada al controlador puede ser significativamente más alto que el voltaje de la bobina, la corriente medida en la fuente de alimentación puede ser bastante más baja que la corriente de la bobina (el controlador y la bobina básicamente actúan como una fuente de alimentación conmutada). Además, si la tensión de alimentación es muy alta en comparación con what el motor necesita alcanzar la corriente establecida, el ciclo de trabajo será muy bajo, lo que también conduce a diferencias significativas entre las corrientes promedio y RMS. Además, tenga en cuenta that la corriente de la bobina es una función del límite de corriente establecido, pero no necesariamente es igual a la configuración del límite de corriente. La corriente real a través de cada bobina cambia con cada micropaso. Consulte la hoja de datos DRV8880 para obtener más información.
Diagrama esquemático
Diagrama esquemático del DRV8880 Portador del conductor del motor paso a paso.
Este esquema también está disponible como pdf descargable (pdf de 121k).
Diferencias clave entre el DRV8880 y A4988
El portador DRV8880 fue diseñado para ser lo más similar posible a nuestros portadores de controlador de motor paso a paso A4988, y se puede utilizar como un reemplazo directo del portador A4988 en muchas aplicaciones porque comparte el mismo tamaño, distribución de pines e interfaz de control general. . Hay algunas diferencias entre los dos módulos that Cabe señalar, sin embargo:
DRV8880 portador del conductor del motor de pasos.
Portador de controlador de motor paso a paso A4988, Black Edition (se muestra con resistencias de detección de corriente verdes originales de 50 m).
El pin utilizado para suministrar voltaje lógico al A4988 se utiliza como salida de FALLA del DRV8880, ya que el DRV8880 no requiere un suministro lógico (y el A4988 no tiene una salida de falla). Notas that es seguro conectar el pin FAULT directamente a una fuente lógica (hay una resistencia de 1.5k entre la salida IC y el pin para protegerlo), por lo que el módulo DRV8880 puede usarse en sistemas diseñados para el A4988 that enrutar el poder lógico a este pin.
El pin SLEEP en el DRV8880 no está levantado por defecto como en el A4988, pero la placa de soporte lo conecta al pin FAULT a través de una resistencia de 10k. Por lo tanto, los sistemas destinados a la A4988 that la alimentación de la lógica de ruta al pin de FALLA tendrá efectivamente un pull-up de 10k en el pin de SLEEP.
El potenciómetro límite actual se encuentra en una ubicación diferente.
La relación entre la configuración del límite de corriente y la tensión del pin de referencia es diferente.
El DRV8880 ofrece un modo de medio paso no circular that el A4988 no.
El DRV8880 solo tiene dos pines para configurar su modo de microstep; El A4988 tiene tres. La tabla de selección de pasos difiere entre DRV8880 y A4988 para todas las resoluciones de microstepping distintas del modo de paso completo. En el DRV8880, el pin M0 debe dejarse en estado flotante (alta impedancia) para seleccionar algunos de los modos de microaspping. El modo de microstepping predeterminado en la portadora DRV8880 es 1 / 8-step, mientras que el modo de microstepping predeterminado en la portadora A4988 es de paso completo.
El DRV8880 no tiene entrada RESET.
El pin ENABLE del DRV8880 habilita al conductor cuando se levanta en el portador. En el A4988, el pin ENABLE habilita al conductor cuando está bajo y es bajado por el transportista.
El DRV8880 tiene una función de autoajuste that el A4988 no. Esta función selecciona automáticamente el mejor modo de caída para un sistema. Además, en case no se desea el autoajuste, los pines de control para configurar el modo de caída en el portador DRV8880 son más accesibles que en el A4988.
Los pines en el portador DRV8880 correspondientes a los pines MS4988 y RESET del portador A3 están conectados a los pines del escalador actual del DRV8880, por lo que los sistemas that conectar esos pines altos por defecto establecerá realmente usar un límite de corriente inferior al 100% del límite establecido con el voltaje VREF.
El soporte DRV8880 tiene un pin TOFF that se usa para ajustar el tiempo de apagado fijo del conductor that no está en la A4988.
Los requisitos de tiempo para duraciones mínimas de pulso en el pin STEP son diferentes para los dos controladores. El DRV8880 solo requiere que los pulsos STEP alto y bajo sean al menos 0.47? S, donde deben ser al menos 1? S cuando se usa el A4988.
El DRV8880 tiene un voltaje de suministro mínimo más bajo que el A4988 (6.5 V frente a 8.2 V) y un voltaje de suministro máximo más alto (45 V frente a 35 V), lo que significa que el DRV8880 se puede utilizar en una gama más amplia de sistemas, es más seguro para usar voltajes más altos y es menos susceptible a daños por picos de voltaje LC.
El DRV8880 usa una convención de nomenclatura diferente para las salidas del motor paso a paso, pero son funcionalmente los mismos que los pines correspondientes en el portador A4988, por lo que las mismas conexiones a ambos controladores dan como resultado el mismo comportamiento del motor paso a paso. En ambas placas, la primera parte de la etiqueta identifica la bobina (por lo que tiene bobinas? A? Y? B? En el DRV8880 y bobinas? 1? Y? 2? En la A4988).
Para aquellos con aplicaciones sensibles al color, tenga en cuenta that el portador DRV8880 es azul.
En resumen, el operador DRV8880 es lo suficientemente similar a nuestros operadores A4988 that El diagrama de conexión mínimo para el A4988 es una forma alternativa válida de conectar el DRV8880 a un microcontrolador también:
Diagrama de cableado mínimo alternativo para la conexión a un microcontrolador al controlador DRV8880 motor paso a paso (modo 1 / 8-step).
Información Adicional
| Peso | 0,05 kg |
|---|---|
| Dimensiones | 5 1 × × 3 cm |
| LA CREACIÓN | Pololu |