


Portador de conductor de motor paso a paso AMIS-30543
20,99 €
- Descripción
- Información Adicional
Descripción
Este producto es una placa portadora o placa de conexión para el controlador de motor de micropasos AMIS-30543 de ON Semiconductor; por lo tanto, recomendamos leer detenidamente la hoja de datos AMIS-30543 (495k pdf) antes de usar este producto. Este controlador de motor paso a paso le permite controlar un motor paso a paso bipolar con una corriente de salida de hasta 3 A por bobina (consulte la sección Consideraciones sobre la disipación de energía a continuación para obtener más información). Estas son algunas de las características clave de la placa:
Paso estándar y la interfaz de control de dirección
Interfaz SPI para configurar ajustes (por ejemplo, modo de paso, límite de corriente, suspensión) y leer registros de estado
Velocidad y ángulo de carga de salida that se puede utilizar para la detección de pérdida o el control de bucle cerrado del par y la velocidad en función del ángulo de carga
Once modos de paso diferentes: paso completo (no compensado, compensado 1-fase o compensado 2-fase), medio paso (no compensado o compensado), 1 / 4-paso, 1 / 8-paso, 1 / 16-paso, Paso 1 / 32, paso 1 / 64 y paso 1 / 128
El control de corriente programable por SPI (de 132 mA a 3 A) permite que su microcontrolador ajuste el límite de corriente máxima sobre la marcha a medida que se necesita más o menos par o velocidad
Control de corte inteligente that selecciona automáticamente el modo de decaimiento actual correcto (decaimiento rápido o decaimiento lento)
PWM de bajo EMI con declives de voltaje seleccionables por SPI
Compatible con microcontroladores de 5V y 3.3V
Regulador integrado de 5V that se puede usar para suministrar un microcontrolador externo
Función de vigilancia integrada
Detección de bobina abierta
La advertencia térmica indica cuando el conductor está cerca de la temperatura de apagado térmico
Estado de sobrecorriente y apagado (protección de corto a tierra y de carga corta)
Protección de voltaje inverso
Nota: Este controlador debe habilitarse y configurarse a través de su interfaz SPI al encender, por lo que su microcontrolador debe ser capaz de actuar como un maestro SPI (ya sea con un periférico SPI o software SPI).
Hardware incluido
Este producto se envía con todos los componentes de montaje en superficie, incluido el controlador IC AMIS-30543, instalado como se muestra en la imagen del producto. Sin embargo, se requiere soldadura para el montaje de las piezas de orificio pasante incluidas. Se incluyen las siguientes piezas de orificio pasante:
¿Una ruptura de 1 × 20 pines 0.1? encabezado masculino
Tres bloques de terminales de 2 pines y 3.5 mm (para potencia de placa y salidas de motor)
¿Uno 0.1? bloque de cortocircuito (para conectar IOREF al pin VDD vecino)
¿El 0.1? El cabezal macho se puede romper o cortar en trozos más pequeños según se desee y soldar en los orificios pasantes más pequeños. Estos encabezados son compatibles con placas de prueba sin soldadura, 0.1? conectores hembra y nuestros cables de puente de primera calidad y prensados. Los bloques de terminales se pueden soldar en los orificios más grandes para permitir conexiones temporales convenientes de cables de motor paso a paso y de potencia sin terminar. También puede soldar los cables del motor y otras conexiones directamente a la placa para una instalación más compacta.
Usando el conductor
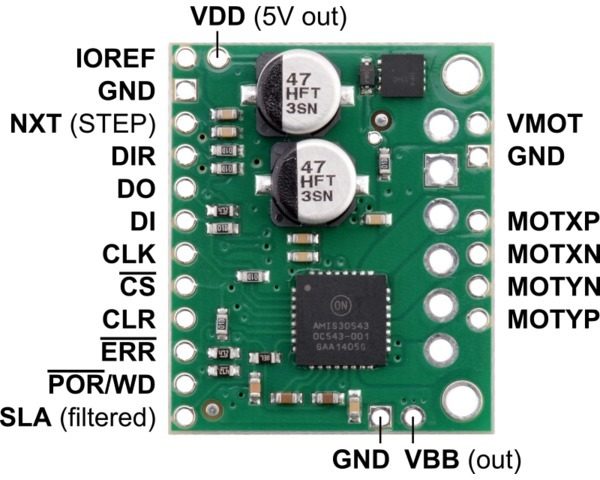
Asignación de pines
Código Postal
Descripción
VMOT
Conexión de la fuente de alimentación de la placa de 6 V a 30 V con protección inversa. Nota: La corriente VDD disponible se reduce para voltajes de entrada por debajo de 8 V, y el modo de suspensión no está disponible para voltajes de entrada por debajo de 9 V.
VBB
Este pin da acceso a la fuente de alimentación del motor después del MOSFET de protección de tensión inversa (consulte el esquema de la placa a continuación). Se puede utilizar para suministrar energía con protección inversa a otros componentes del sistema. Generalmente está pensado como una salida, pero también se puede utilizar para suministrar alimentación a la placa.
GND
Puntos de conexión a tierra para la fuente de alimentación del motor y la referencia de tierra de control. La fuente de control y el controlador del motor deben compartir un terreno común.
MOTXP
Salida del motor: ¿Positiva? final de la fase X bobina.
MOTXN
Potencia del motor: ¿Negativa? final de la fase X bobina.
MOTYP
Salida del motor: ¿Positiva? final de la fase Y bobina.
MOTYN
Potencia del motor: ¿Negativa? final de la fase Y bobina.
VDD (5V SALIDA)
La placa está alimentada por un regulador interno de 5 V, y este pin da acceso a la salida regulada de 5 V. Esto se puede usar para suministrar el pin IOREF vecino cuando se usa esta placa en sistemas de 5V, y se puede usar para alimentar un microcontrolador externo. Cuando VMOT es superior a 8 V, aproximadamente 30 mA están disponibles para componentes externos; cuando VMOT es inferior a 8 V, la corriente disponible cae a menos de 10 mA.
instrucción IOREF
Todas las salidas de señal de la placa (excepto SLA) son salidas de drenaje abierto that se colocan en IOREF, por lo que este pin debe recibir el voltaje lógico del sistema de control (por ejemplo, 3.3V para usar en sistemas de 3.3V). Para mayor comodidad, se puede conectar al pin VDD vecino cuando se utiliza en un sistema de 5V.
NXT
Los cambios en esta entrada mueven la corriente del motor un paso hacia arriba o hacia abajo en la tabla del traductor (incluso cuando el motor está desactivado). El borde that desencadena el paso depende del bit de configuración de polaridad NXT, que se puede cambiar a través de la interfaz SPI (flanco ascendente de forma predeterminada).
DIR
Entrada that determina la dirección de rotación. La dirección también se puede controlar a través de la interfaz SPI.
DO
Salida de datos SPI. (Este pin también se conoce como? MISO?.)
DI
Entrada de datos SPI. (Este pin también se conoce como? MOSI?.)
CLK
Entrada de reloj SPI.
CS
Entrada de selección de chip SPI. Se requieren transiciones lógicas en este pin para la comunicación SPI, incluso si este es el único dispositivo en el bus SPI.
CLR
Chip de reinicio de entrada. Una lógica alta en esta entrada borra todos los registros internos, excepto en el modo de suspensión.
ERR
Error de salida. Este pin conduce bajo para indicar that Se ha producido una condición de error. El error específico se puede determinar utilizando la interfaz SPI para verificar los indicadores de error.
POR / WD
Encendido reinicio / salida de la función de vigilancia. Este pin proporciona una señal activa-baja that se puede usar como entrada de reinicio para un microcontrolador externo.
SLA (filtrado)
Salida SLA (velocidad y ángulo de carga) después de un filtro de paso bajo. El resultado es un voltaje analógico entre 0 V y 5 V that indica el nivel de la tensión contra EMF del motor. Esta señal se puede utilizar para la detección de bloqueo o el control de bucle cerrado del par y la velocidad en función del ángulo de carga. Nota: Dado que la salida de este pin varía de 0 V a 5 V independientemente de IOREF, se deben tomar precauciones adicionales al conectar este pin a un dispositivo de 3.3V (como pasarlo a través de un divisor de voltaje apropiado).
Diagrama de cableado mínimo general
Diagrama de cableado mínimo para conectar un microcontrolador a un portador de controlador de motor paso a paso AMIS-30543.
Si bien el AMIS-30543 permite el control de un motor paso a paso a través de una interfaz simple de paso (NXT) y dirección (DIR), primero debe habilitarse y configurarse a través de su interfaz SPI. Esto significa that el microcontrolador de control debe ser capaz de actuar como un maestro SPI (ya sea con un periférico SPI o SPI de software), y debe estar conectado a los pines DI, CLK y CS. Si bien los pines DO y ERR no están obligados a usar este controlador, generalmente es una buena práctica usarlos para monitorear las condiciones de error.
Diagrama de cableado mínimo (solo sistemas de 5 V)
Diagrama de cableado mínimo para conectar un microcontrolador con un voltaje lógico de 5 V a un portador de controlador de motor paso a paso AMIS-30543.
El AMIS-30543 tiene un regulador interno de 5 V that se puede utilizar para suministrar IOREF en cases donde la placa se utiliza en sistemas de 5 V. Este regulador interno también se puede utilizar para suministrar el voltaje lógico del microcontrolador externo si el regulador puede entregar la corriente requerida, en la cual case habría un cable desde el AMIS-30543 VDD al microcontrolador VDD en el diagrama anterior, y la? fuente de alimentación lógica? caja no estaría presente.
Biblioteca de Arduino y código de ejemplo.
Controlar un controlador de motor paso a paso AMIS-30543 con un 3104U32 Mini SV compatible con Arduino # 4 A-Star.
Si es nuevo en AMIS-30543 o en motores paso a paso en general, nuestra biblioteca AMIS-30543 Arduino puede ayudarlo a comenzar. La biblioteca proporciona funciones básicas para configurar y operar el controlador usando un controlador Arduino o compatible con Arduino. También proporciona acceso a muchas de las funciones avanzadas del controlador e incluye bocetos de ejemplo that mostrarle cómo usarlos.
Consideraciones de disipación de potencia.
El controlador IC AMIS-30543 tiene una clasificación de corriente máxima de 3 A por bobina, pero la corriente real que puede entregar depende de qué tan bien pueda mantener frío el IC. La placa de circuito impreso del portador está diseñada para extraer calor del IC, pero para suministrar más de aproximadamente 1.8 A por bobina de forma continua, se requiere un disipador de calor u otro método de enfriamiento. Sin embargo, es posible utilizar el límite de corriente configurable por SPI para entregar selectivamente corrientes más altas que esta por períodos cortos sin sobrecalentar el controlador.
Este producto puede calentarse lo suficiente como para quemarlo mucho antes de que el chip se sobrecaliente. Tenga cuidado al manipular este producto y otros componentes conectados a él.
Tenga en cuenta that medir el consumo de corriente en la fuente de alimentación generalmente no proporcionará una medida precisa de la corriente de la bobina. Dado que el voltaje de entrada al controlador puede ser significativamente más alto que el voltaje de la bobina, la corriente medida en la fuente de alimentación puede ser bastante más baja que la corriente de la bobina (el controlador y la bobina básicamente actúan como una fuente de alimentación conmutada). Además, si la tensión de alimentación es muy alta en comparación con what el motor necesita alcanzar la corriente establecida, el ciclo de trabajo será muy bajo, lo que también conduce a diferencias significativas entre las corrientes promedio y RMS.
Diagrama esquemático
Diagrama esquemático del portador del controlador del motor paso a paso AMIS-30543.
Información Adicional
| Peso | 0,05 kg |
|---|---|
| Dimensiones | 5 1 × × 3 cm |
| LA CREACIÓN | Pololu |