























Kit de robot d'équilibrage Balboa 32U4 (sans moteurs ni roues)
67,81 €
Avertissez-moi lorsque l'article est disponible.
- Description
- Plus d'Infos
Description
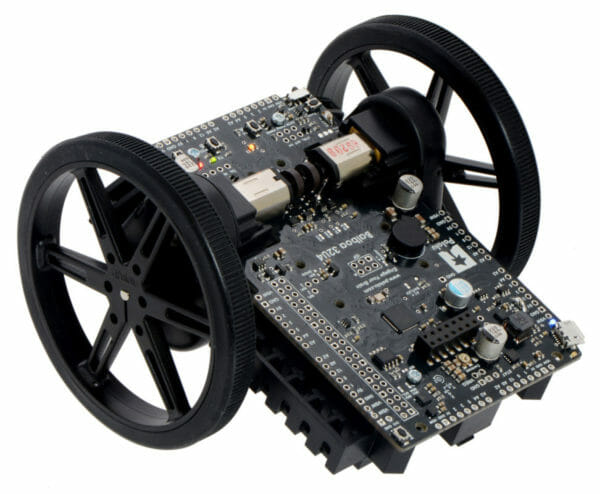
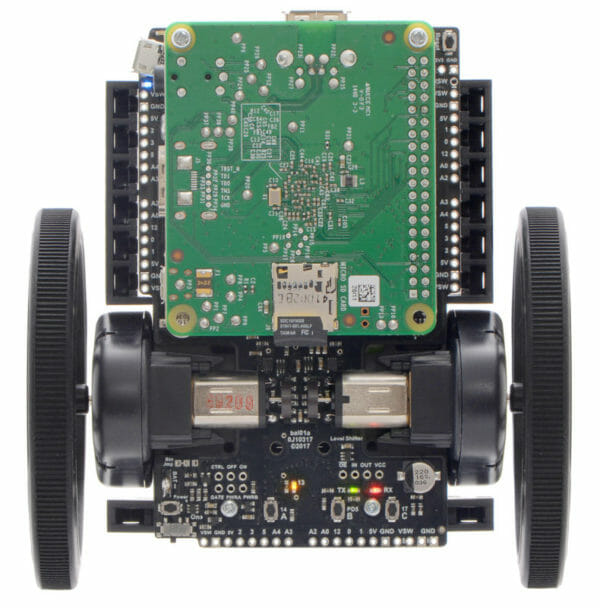
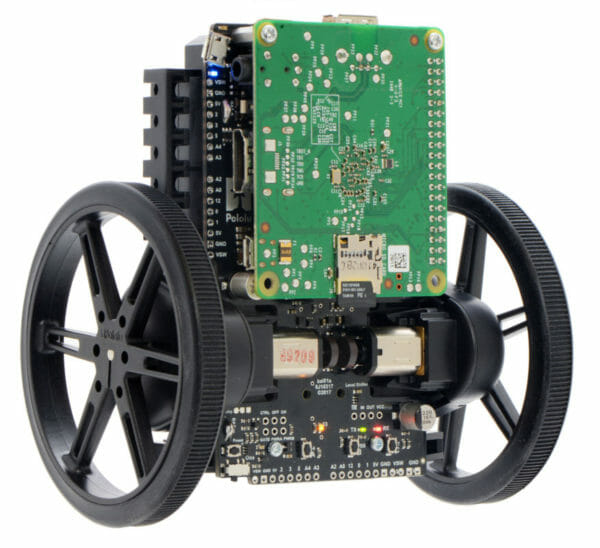
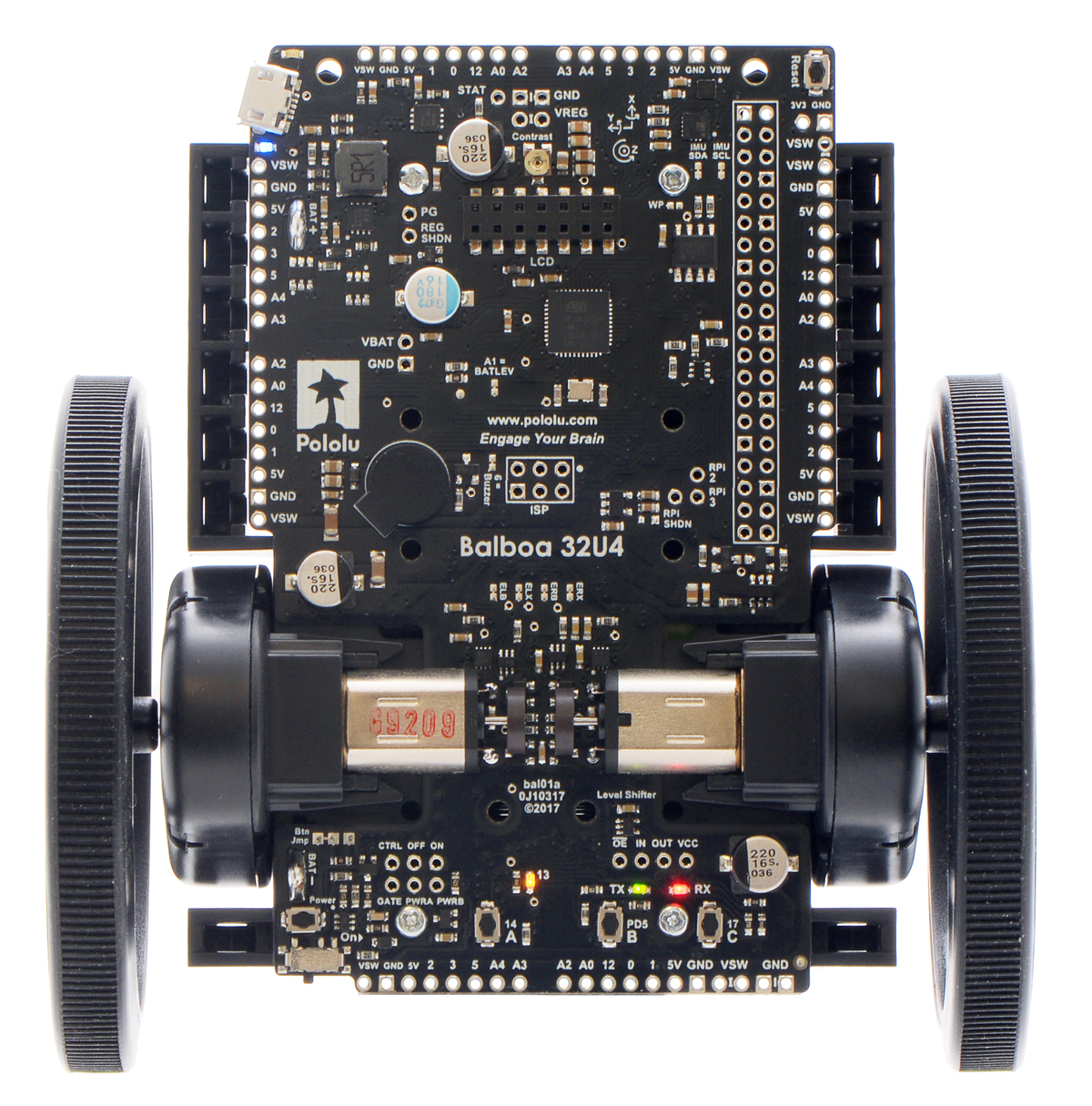
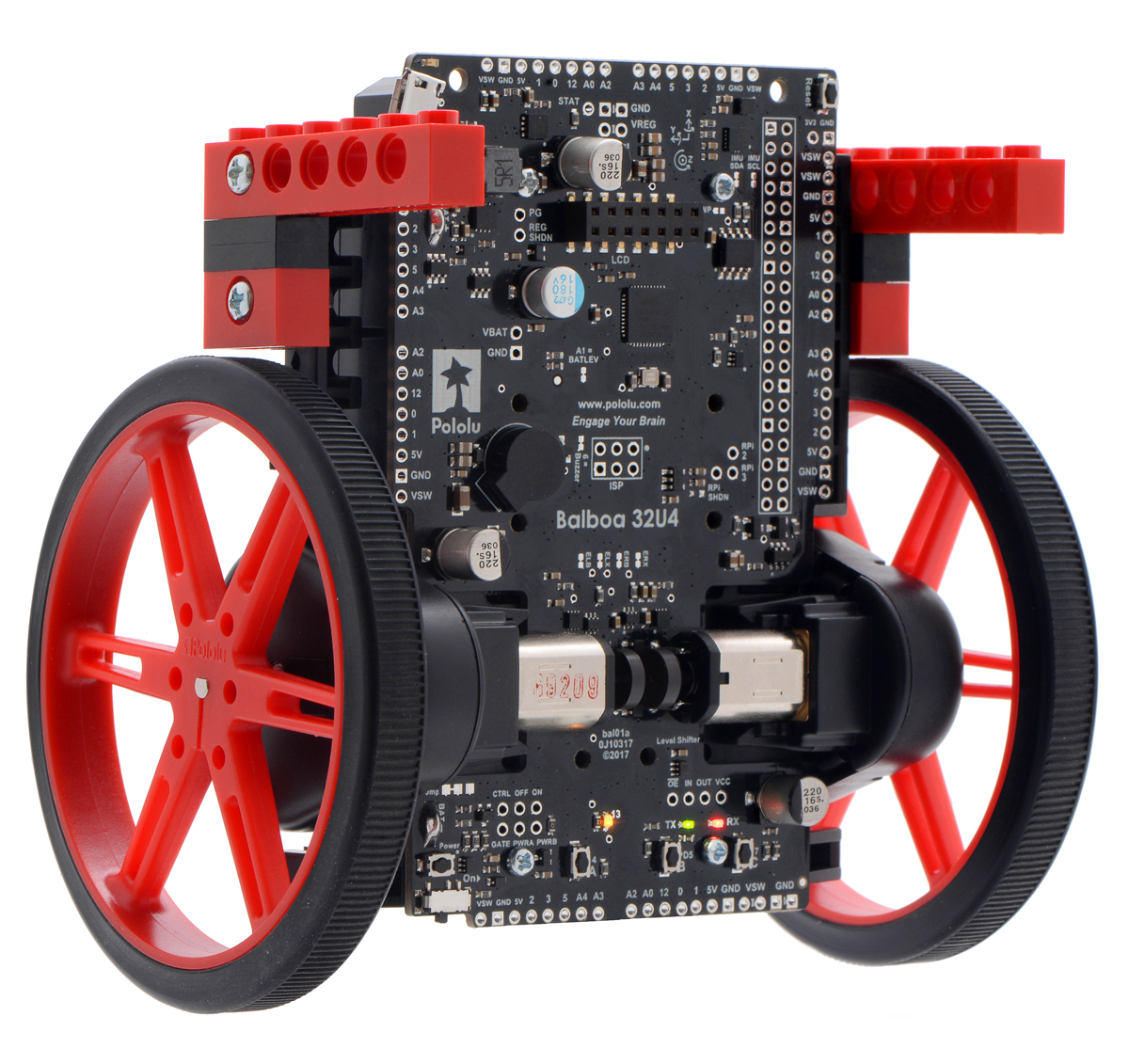
Construisez votre propre robot d'équilibrage programmable avec le kit robot Balboa 32U4 ! La carte de contrôle Balboa comprend un MCU ATmega32U4 compatible Arduino, des pilotes de moteur, des encodeurs en quadrature et une IMU complète. Cette carte a également la capacité de s'interfacer avec un Raspberry Pi, jetant les bases d'un Raspberry Pi-robot d'équilibrage contrôlé. Les moteurs et les roues ne sont pas inclus : choisissez vos roues et moteurs pour personnaliser votre robot.
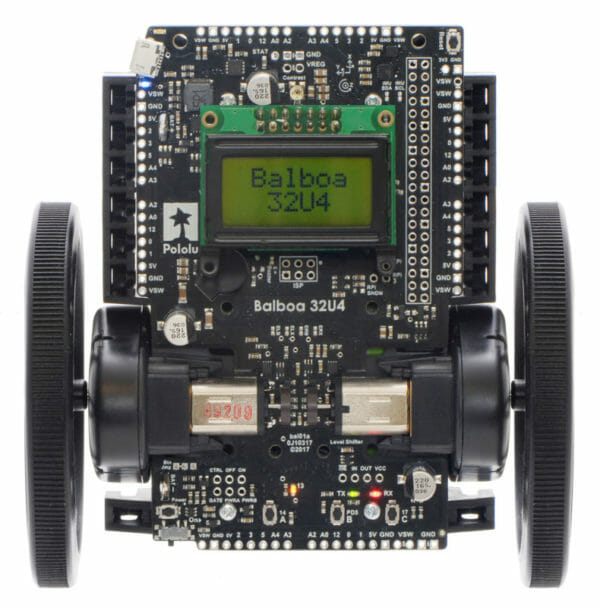
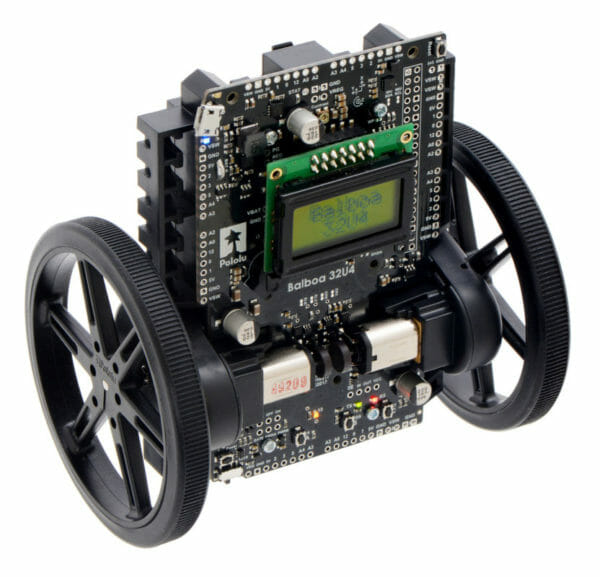
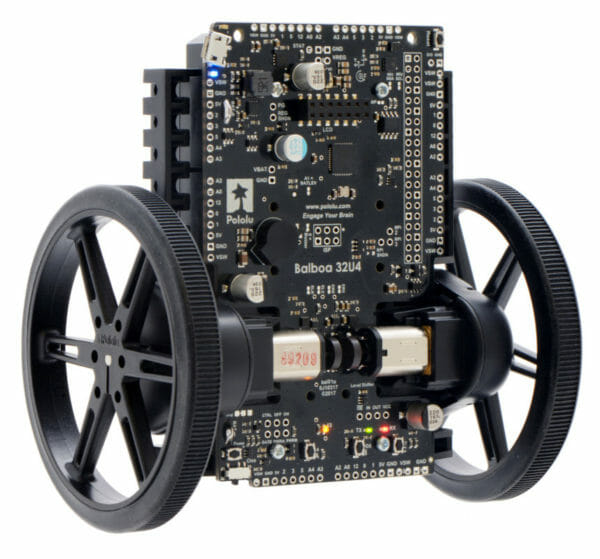
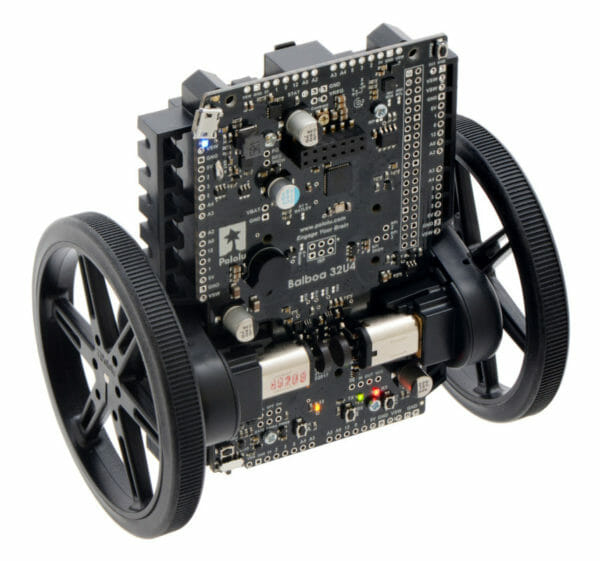
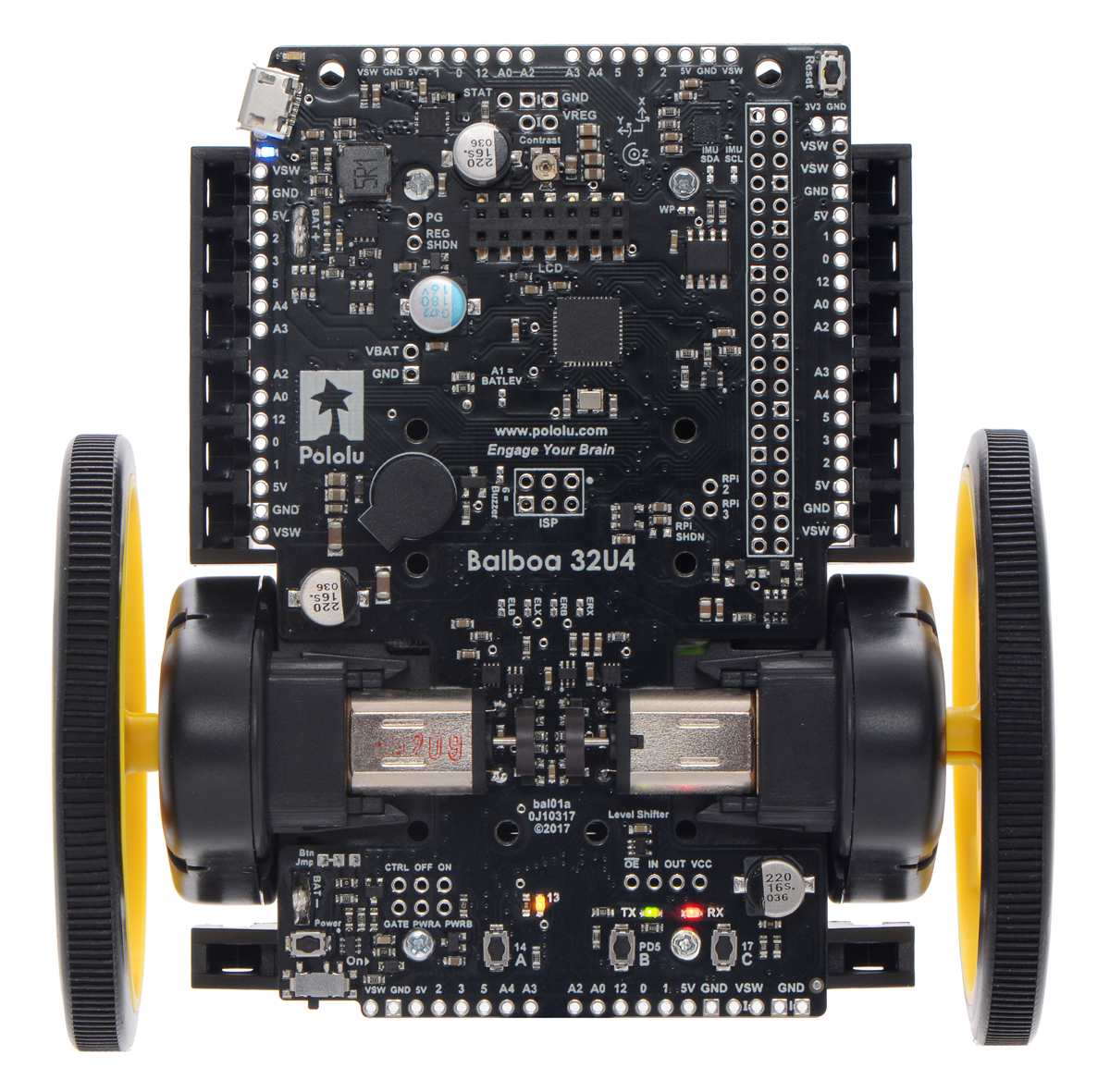
Le Balboa 32U4 est un petit robot d'équilibrage programmable par l'utilisateur basé sur le microcontrôleur AVR ATmega32U4 compatible Arduino de Microchip (anciennement Atmel) et doté de deux pilotes de moteur à pont en H, d'encodeurs en quadrature pour le contrôle de moteur en boucle fermée, d'une unité de mesure inertielle complète (accéléromètre à 3 axes, gyroscope et magnétomètre) pour estimer l'orientation et l'équilibrage, et une interface en option pour connecter un Raspberry Pi effectuer une Raspberry Pi-robot d'équilibrage contrôlé. La carte de commande comprend un puissant régulateur abaisseur de commutation 5 V that peut fournir jusqu'à 2 A en continu, ainsi qu'un circuit de commutation et de distribution d'alimentation polyvalent. Trois boutons-poussoirs intégrés offrent une interface pratique pour la saisie de l'utilisateur, tandis que des voyants LED, un avertisseur sonore et un connecteur pour un LCD (non inclus) permettent au robot de fournir des commentaires.
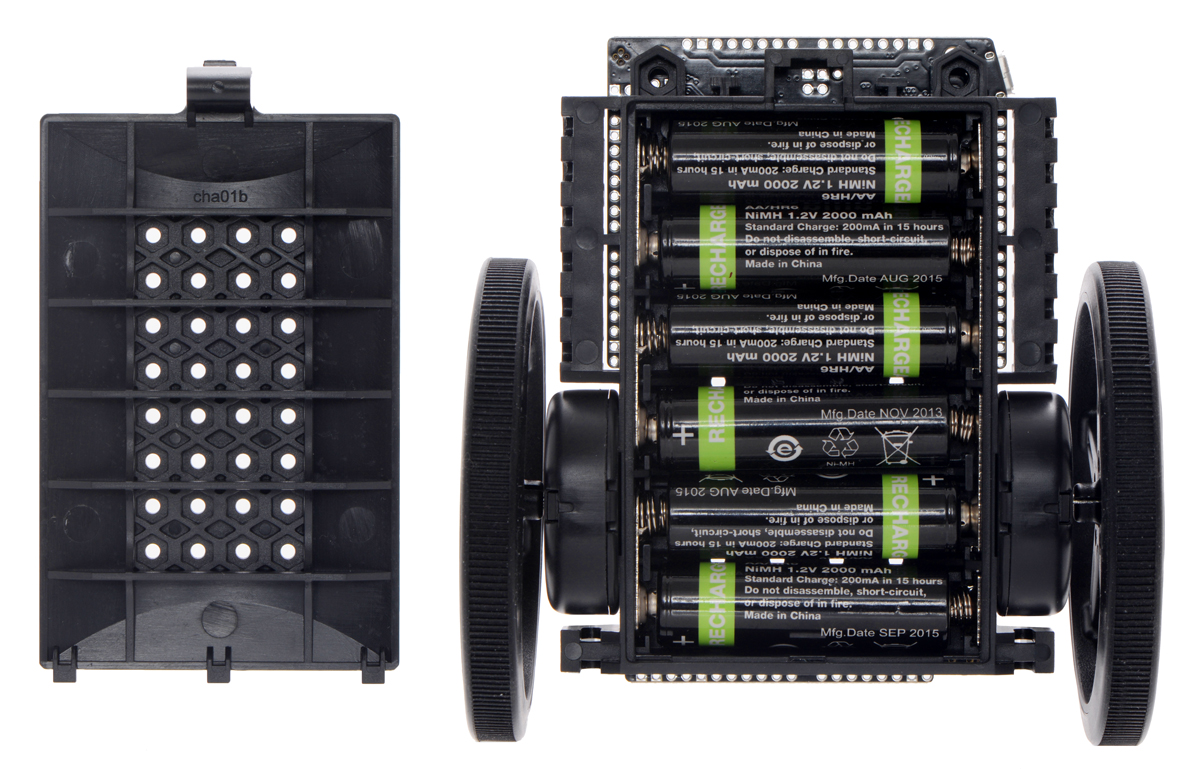
Il s'agit d'un kit; l'assemblage (y compris la soudure) est requis. Les moteurs et les roues ne sont pas inclus vous pouvez donc choisir le vôtre pour personnaliser votre robot ; voir ci-dessous pour plus de détails. Balboa court sur six piles AA (non inclus) et un Câble USB A vers Micro-B (non inclus) est requis pour la programmation.
|
|
|

 |
Aimez notre Robot Zumo 32U4 et Contrôleurs programmables A-Star 32U4, qui sont basés sur le même microcontrôleur, Balboa 32U4 dispose d'une interface USB et est livré préchargé avec un chargeur de démarrage compatible Arduino. Un module complémentaire de logiciel est disponible that facilite la programmation du robot à partir de l'environnement Arduino, et nous avons des bibliothèques Arduino et des exemples de croquis pour vous aider à démarrer. À Câble USB A vers Micro-B (non inclus) est requis pour la programmation. Pour ceux qui souhaitent personnaliser ou améliorer leurs robots avec des périphériques supplémentaires, les rails d'alimentation du robot et les lignes d'E/S du microcontrôleur sont accessibles via des trous traversants espacés de 0.1 ″ le long des côtés, avant/haut et arrière/bas de la commande planche.
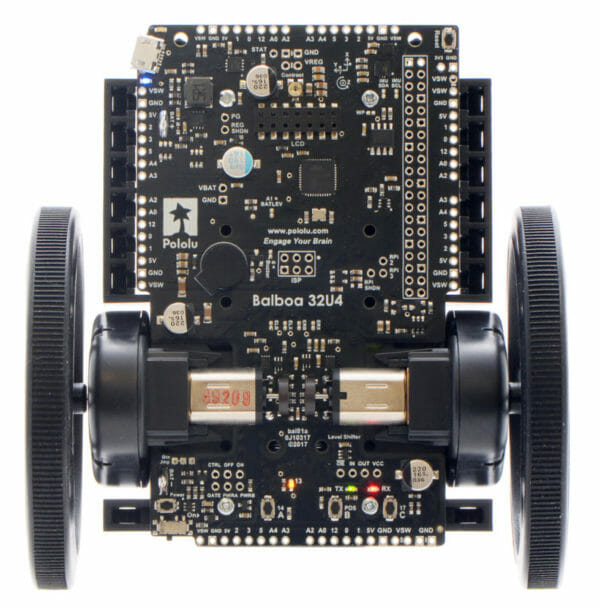
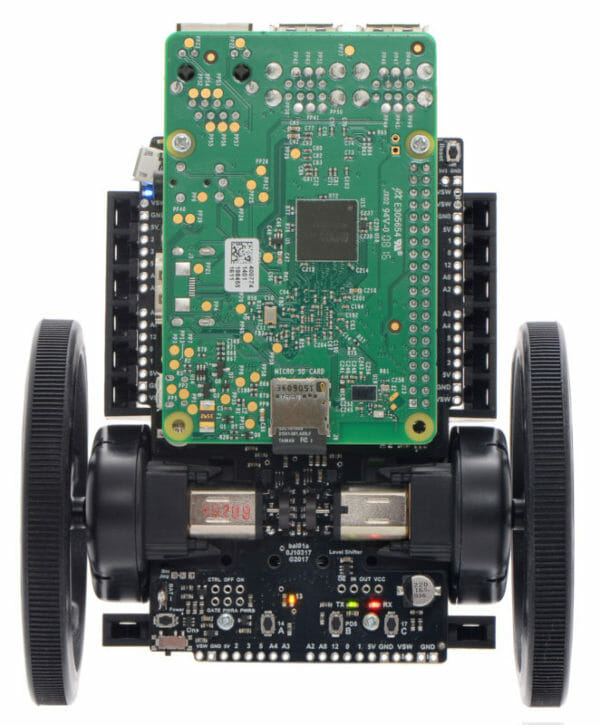
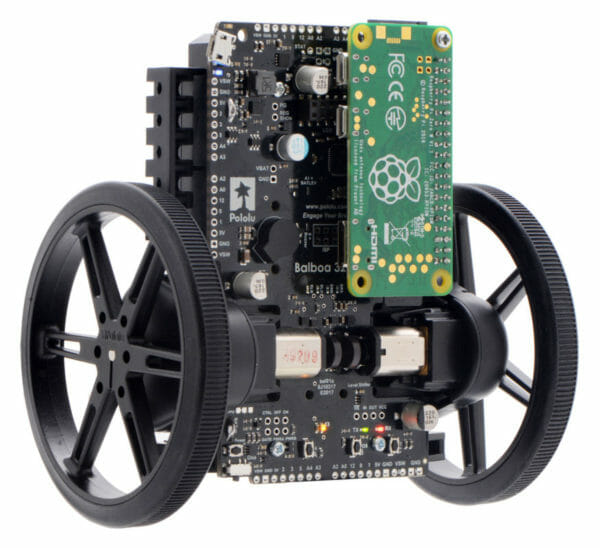
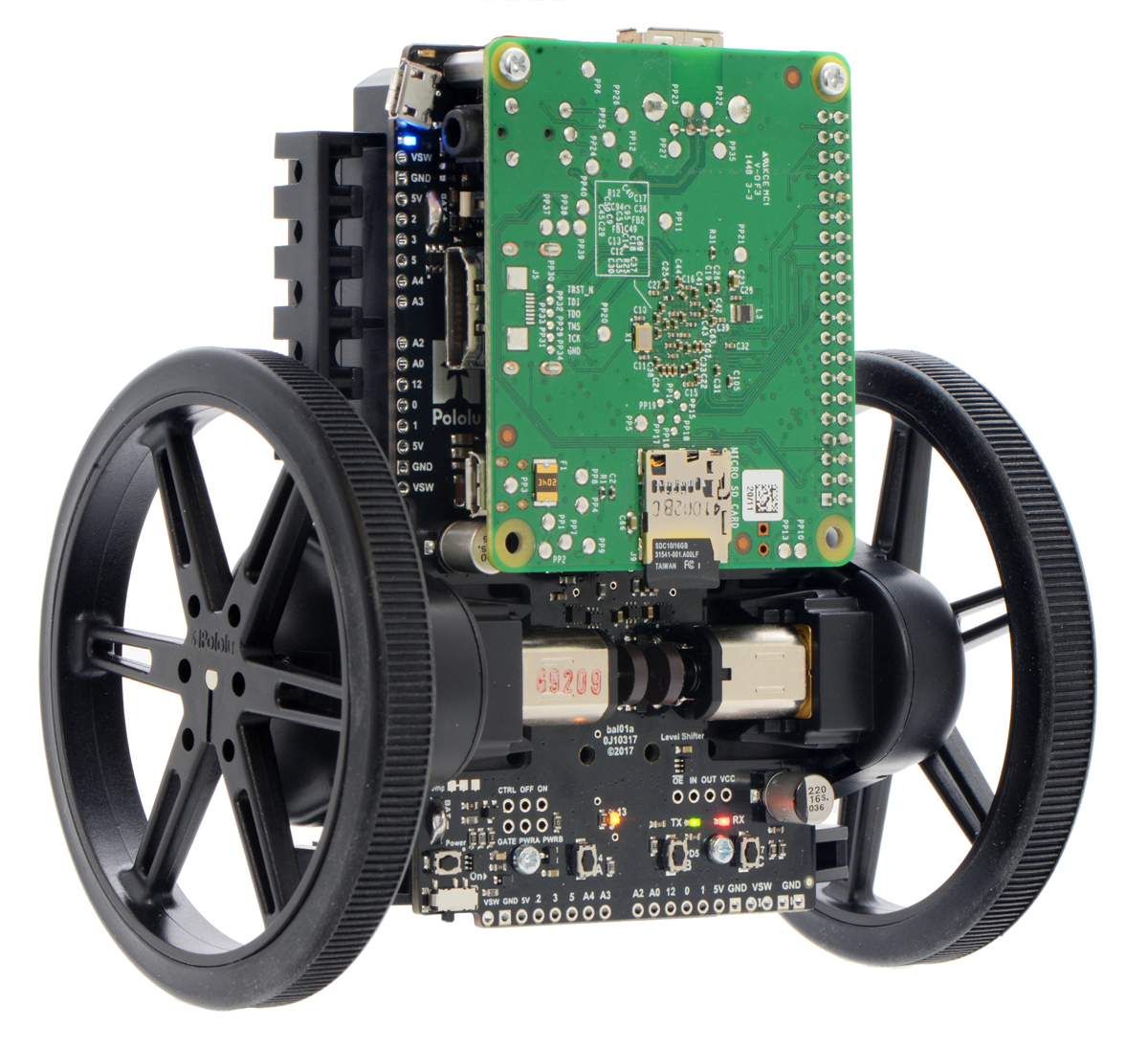
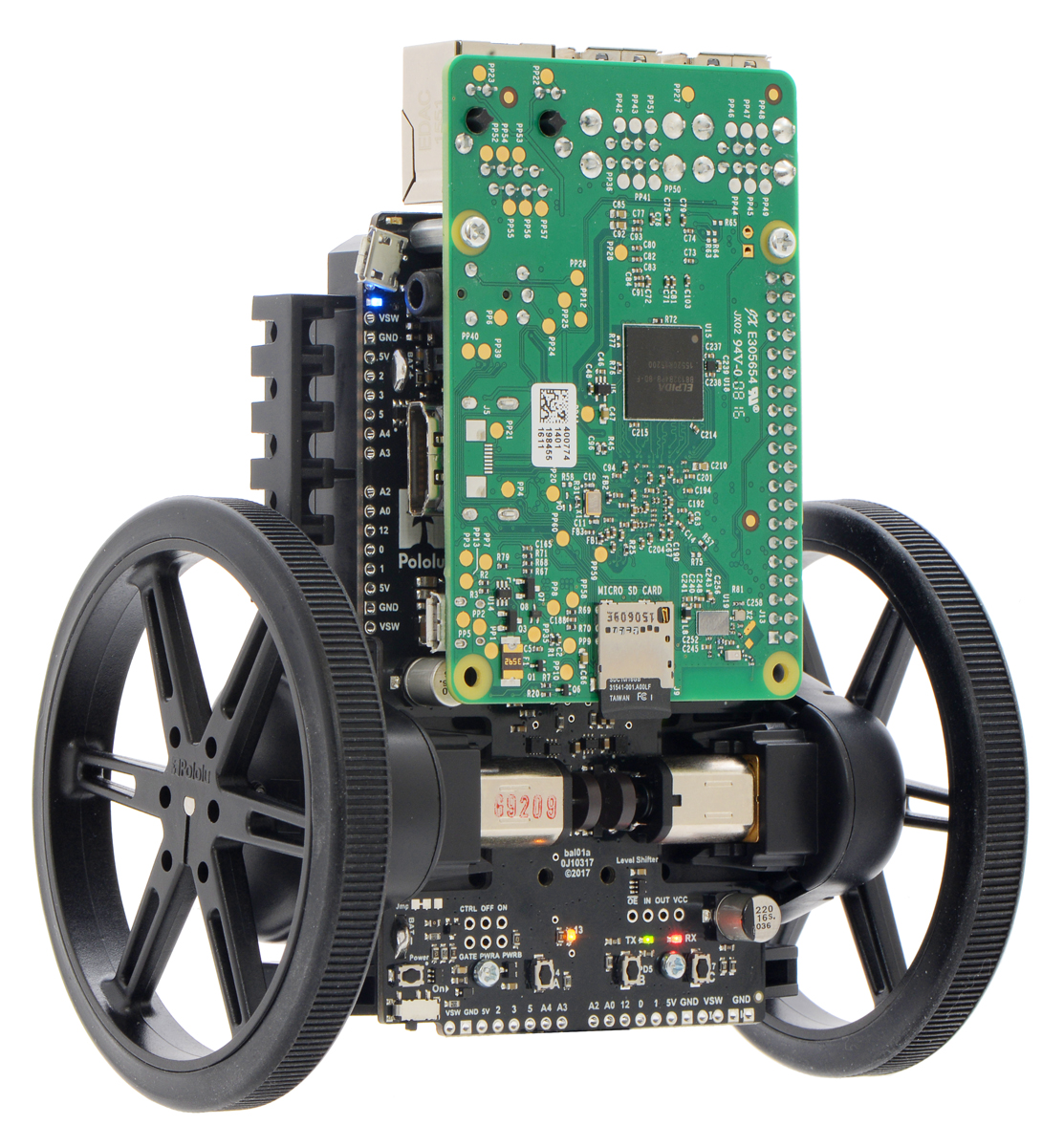
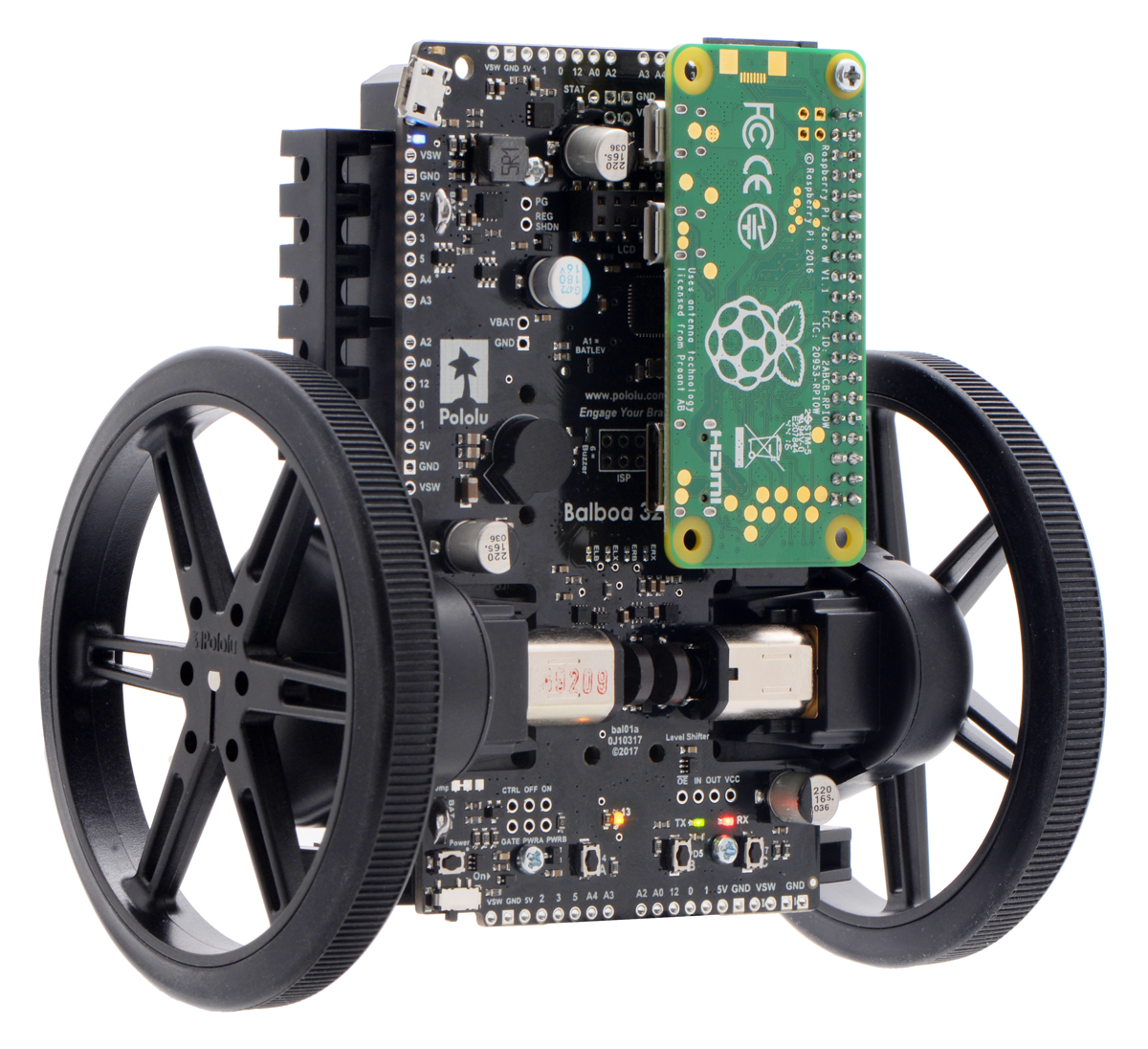
La carte de commande Balboa 32U4 peut servir de contrôleur principal du robot, ou elle peut servir de base pour un plus puissant Raspberry Pi manette. Avec l'ajout d'un 2 × en-tête femelle 20 et Impasses (aucun d'entre eux n'est inclus), un Raspberry Pi (Modèle B + ou plus récent, y compris Pi 3 modèle B + et Modèle A +) peut se brancher directement sur la carte. Les décaleurs de niveau intégrés facilitent la configuration de la communication I²C et l'interface d'autres signaux entre les deux contrôleurs, et la carte de commande fournit automatiquement une alimentation de 5 V à un Raspberry Pi. Dans cette configuration, le Raspberry Pi peut gérer le contrôle de haut niveau du robot tout en s'appuyant sur le microcontrôleur ATmega32U4 de Balboa pour les tâches de bas niveau, telles que le fonctionnement de moteurs, la lecture d'encodeurs et l'interfaçage avec d'autres dispositifs analogiques ou sensibles au temps.
|
|
|
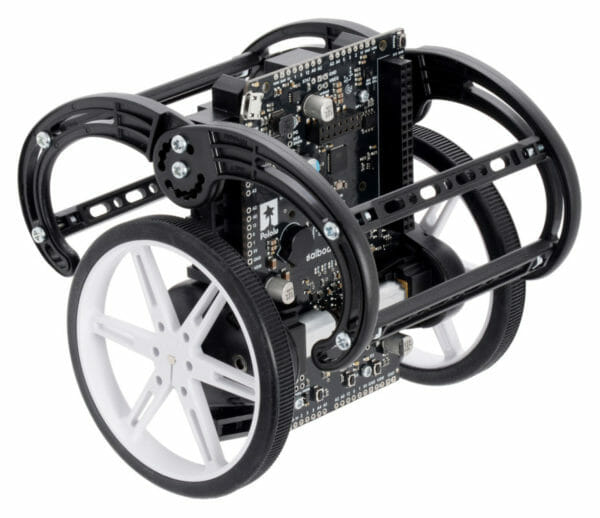
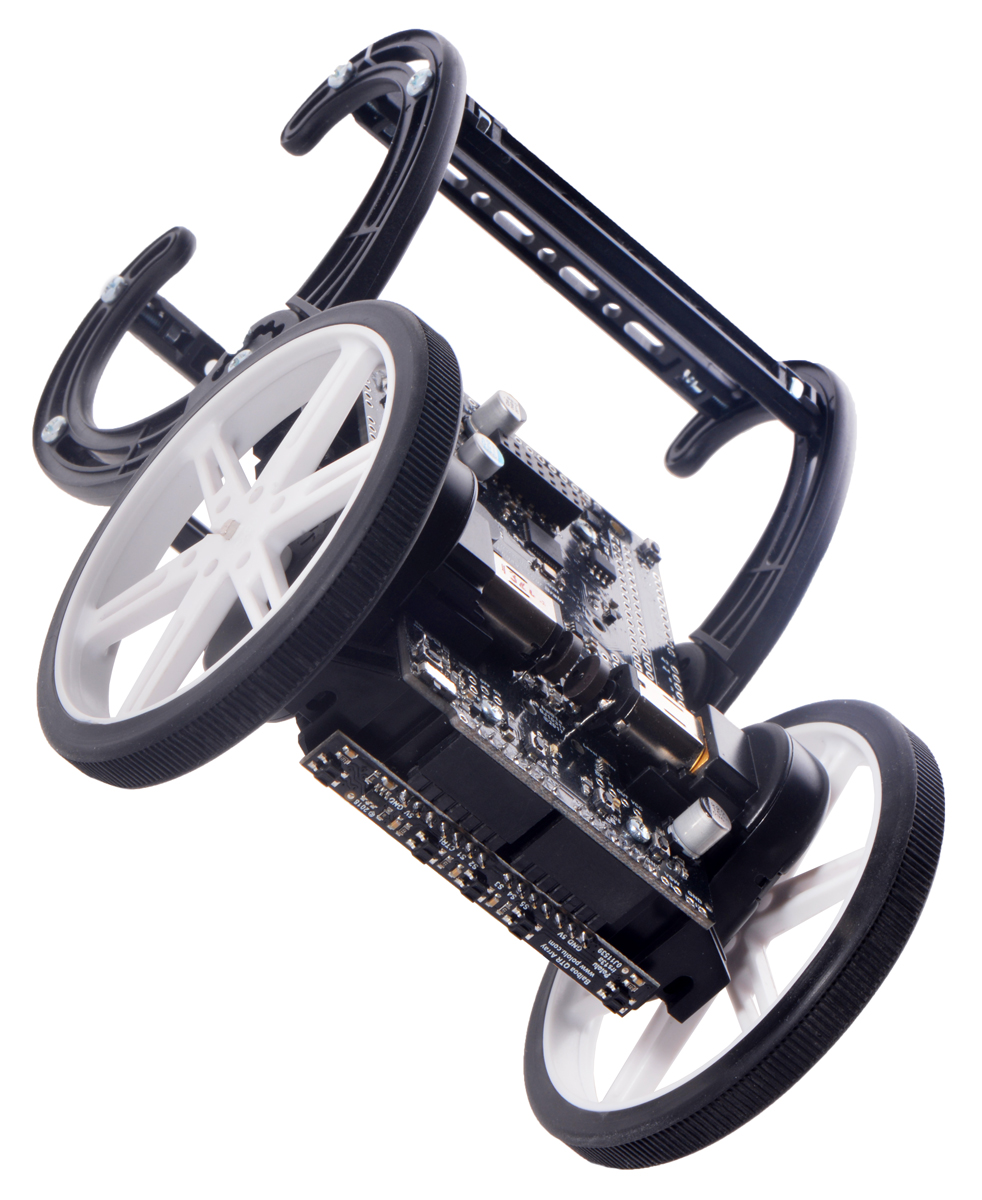
Pour ceux qui veulent faire fonctionner le Balboa comme un robot traditionnel à entraînement différentiel orienté sur le côté, un Kit de conversion de stabilité est disponible séparément. Cet accessoire s'enclenche sur l'extrémité avant du châssis Balboa pour l'allonger et contient une roulette à billes incluse, offrant un troisième point de contact à faible friction. Ce module complémentaire est également utile dans les applications d'équilibrage, où la roulette à billes peut être laissée et la pièce d'extension peut être utilisée pour rendre le Balboa plus grand et lui donner plus de points de montage. Pour ceux qui souhaitent fournir leur propre électronique, consultez le Châssis Balboa avec kit de conversion de stabilité.
|
|
|



La Réseau de capteurs de réflectance à 5 canaux pour Balboa peut être monté directement sur la carte de commande Balboa 32U4 et fournit un moyen facile d'ajouter une détection de ligne à un Balboa d'équilibrage.
 |
| Réseau de capteurs de réflectance à 5 canaux pour Balboa dans l'option de montage aligné sur les bords. |
|---|
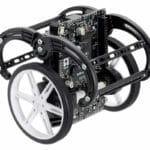
Sélection des moteurs et des roues
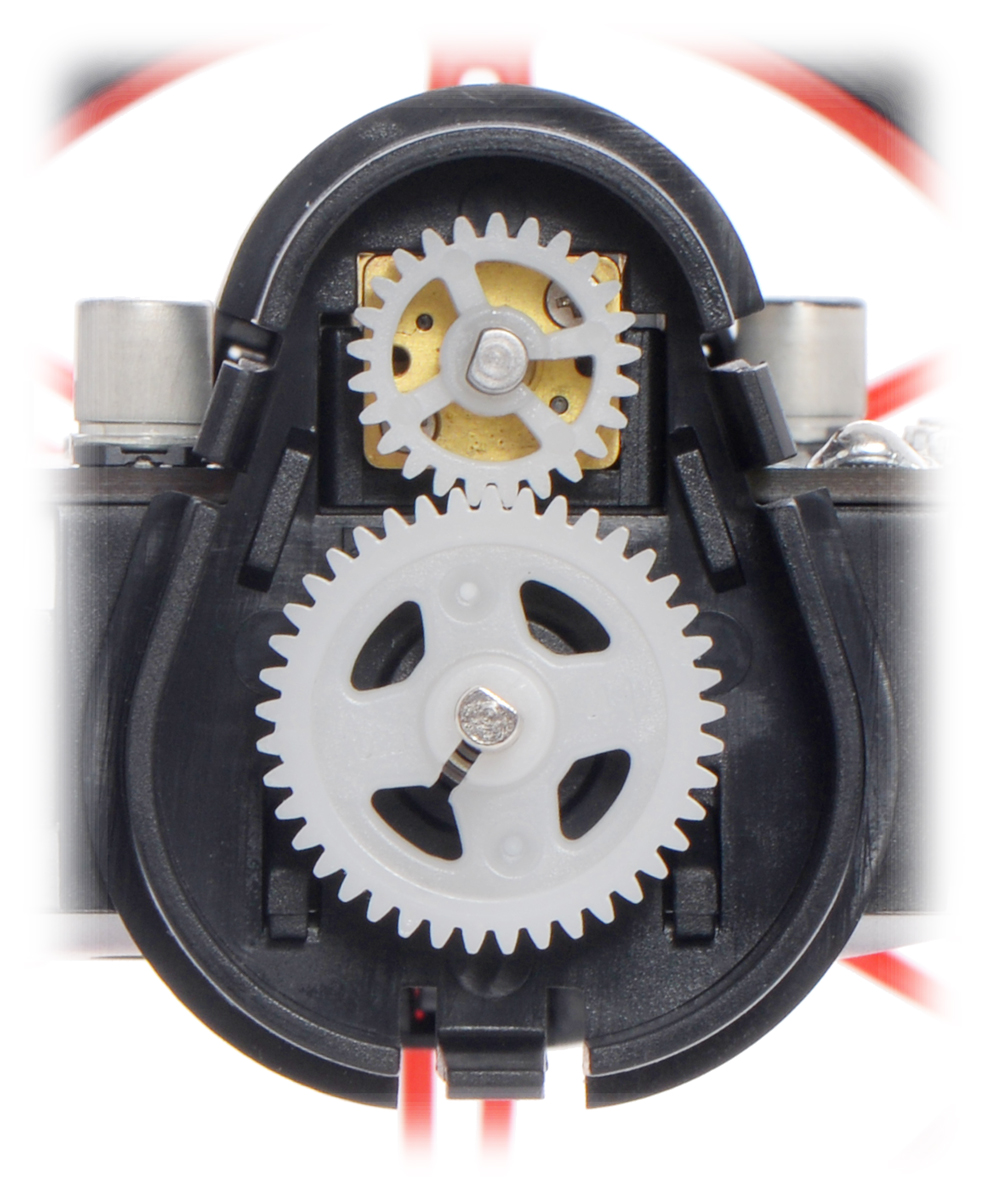 |
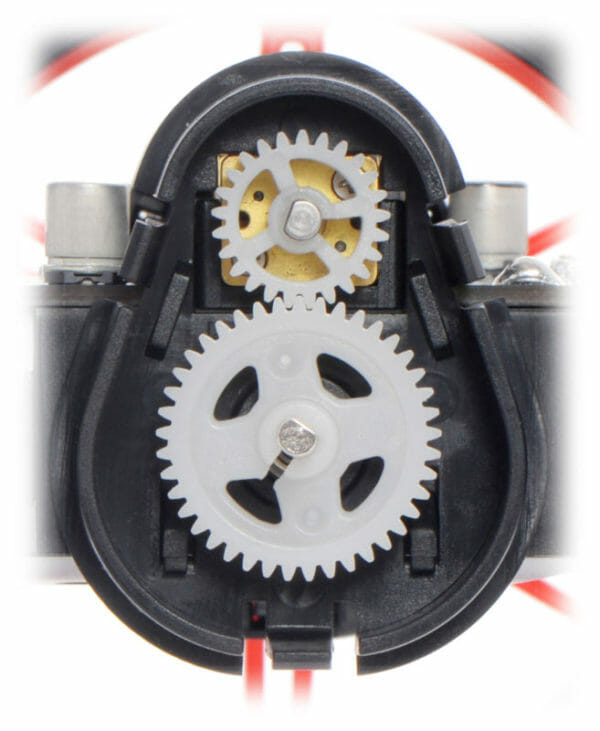
| Un aperçu de la boîte de vitesses externe du robot d'équilibrage Balboa 32U4. |
|---|
Le Balboa utilise deux micro-réducteurs métalliques pour entraîner des boîtes de vitesses externes à 2 vitesses that augmentez encore le rapport de démultiplication et supportez le poids du robot avec des roulements à billes plutôt que les arbres du moteur eux-mêmes. Le kit Balboa vous offre cinq options de réduction au choix lors de l'assemblage de votre robot (allant de 1.64 : 1 à 2.88 : 1), et vous pouvez personnaliser davantage le rapport de démultiplication en fonction du micro-moteur à engrenages en métal que vous choisissez pour votre robot, c'est pourquoi nous n'incluons pas les moteurs avec le kit. Les codeurs en quadrature intégrés nécessitent des motoréducteurs avec des arbres moteurs allongés, et nous recommandons spécifiquement le 30 : 1 HPCB, 50 : 1 HPCBou 75 : 1 HPCB versions.
 |
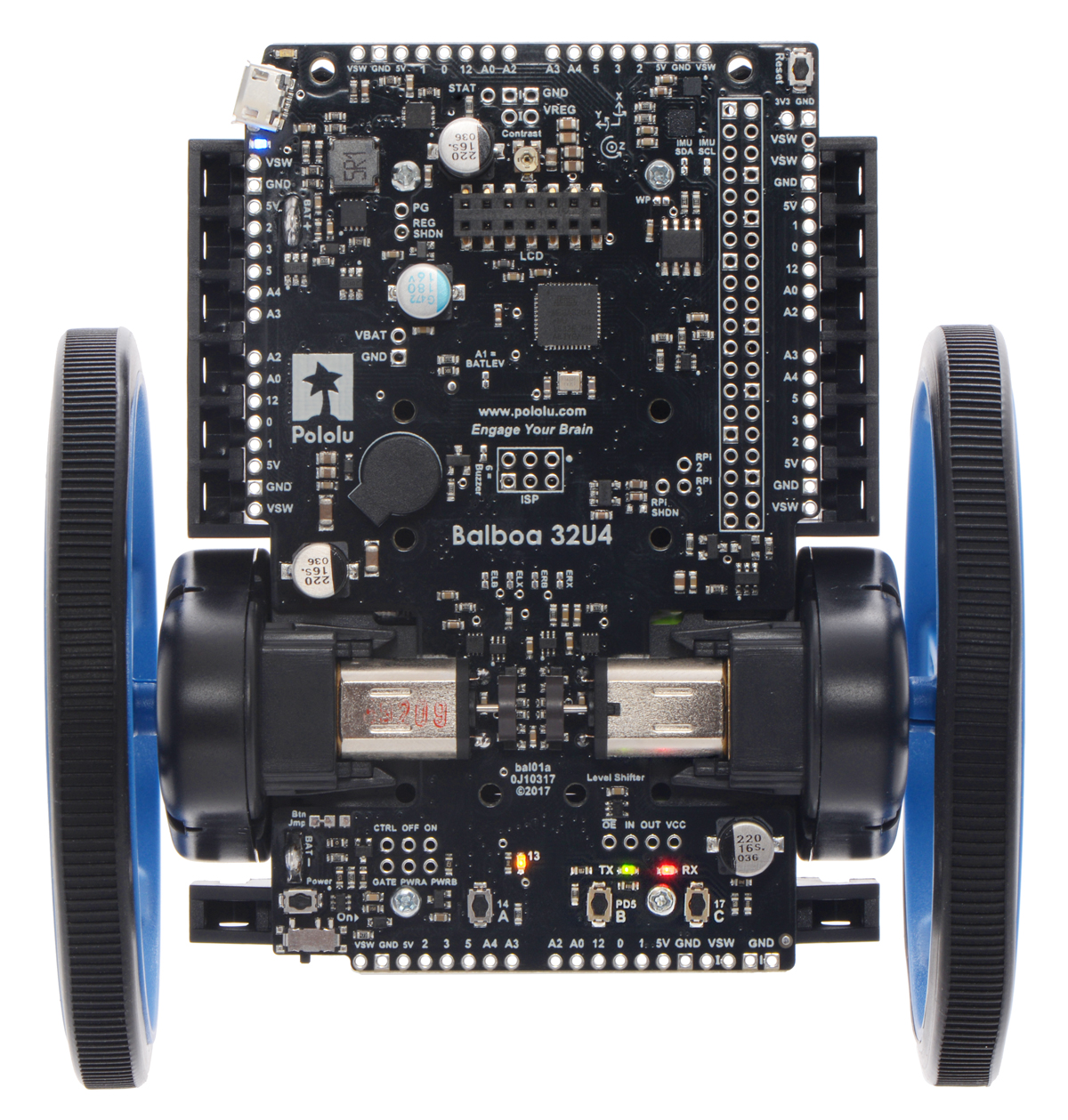
Nous n'incluons pas non plus les roues avec le kit car il existe un certain nombre d'options parmi lesquelles choisir. Nous recommandons les roues Pololu 80 × 10 mm, disponibles en cinq couleurs - noir, rouge, jaune, Bleuet blanc - mais notre plus grand Roues 90 × 10mm et plus petit Roues 70 × 8mm sont également des options si vous savez what vous faites (note that les roues 70 × 8 mm n'offrent que quelques millimètres de jeu lors de l'équilibrage).
|
|
|
Contenu du kit
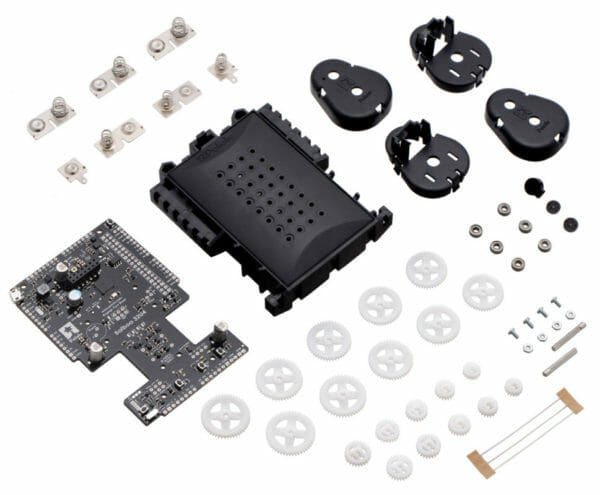
A l'exception des moteurs et des roues, ce kit contient tout le nécessaire pour construire un robot d'équilibrage Balboa 32U4 :
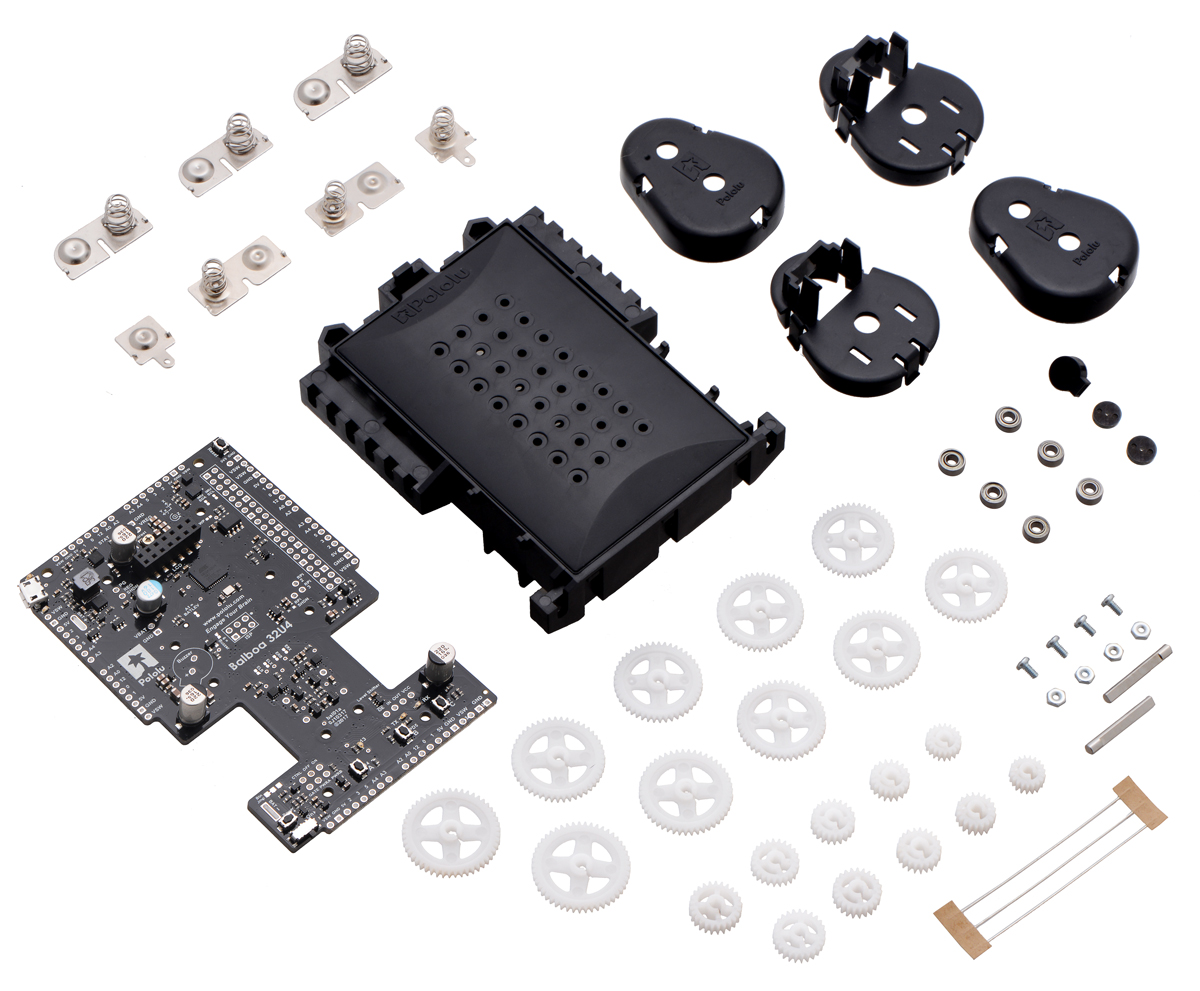 |
| Composants du kit de robot d'équilibrage Balboa 32U4 (les roues et les moteurs ne sont pas inclus). |
|---|
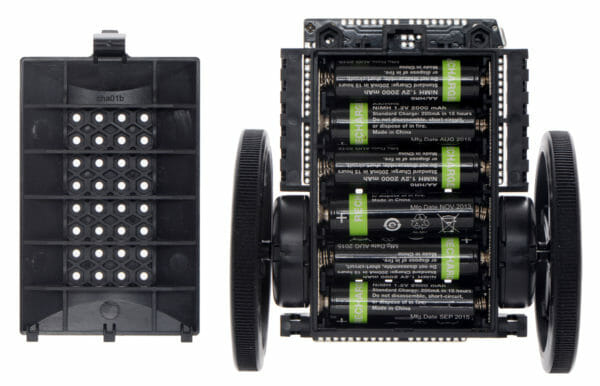
Toutes les unités vendues après le 19 mai 2017 comprennent également un kit de cage de pare-chocs that peut éventuellement être utilisé pour protéger le robot des chutes ou comme patins that le Balboa peut se reposer en roulant comme alternative à l'équilibrage :
 |
| Kit de cage de pare-chocs pour robot d'équilibrage Balboa 32U4. |
|---|
|
|
|

Voir le Guide d'utilisation du robot d'équilibrage Balboa 32U4 pour des instructions de montage détaillées.
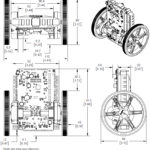
Dimensions
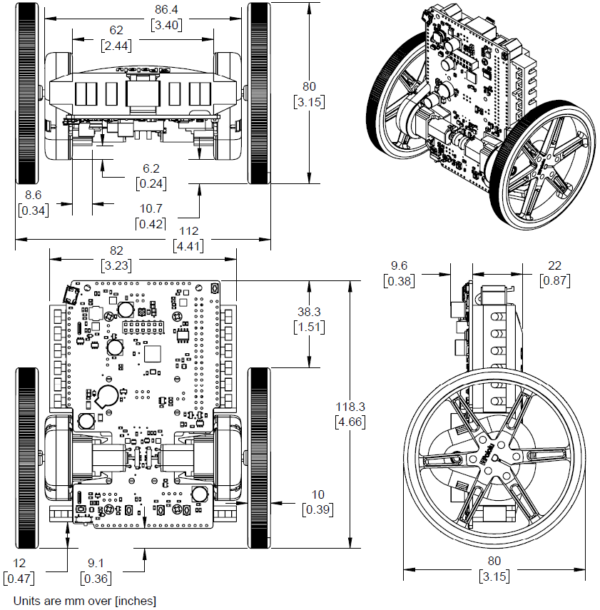
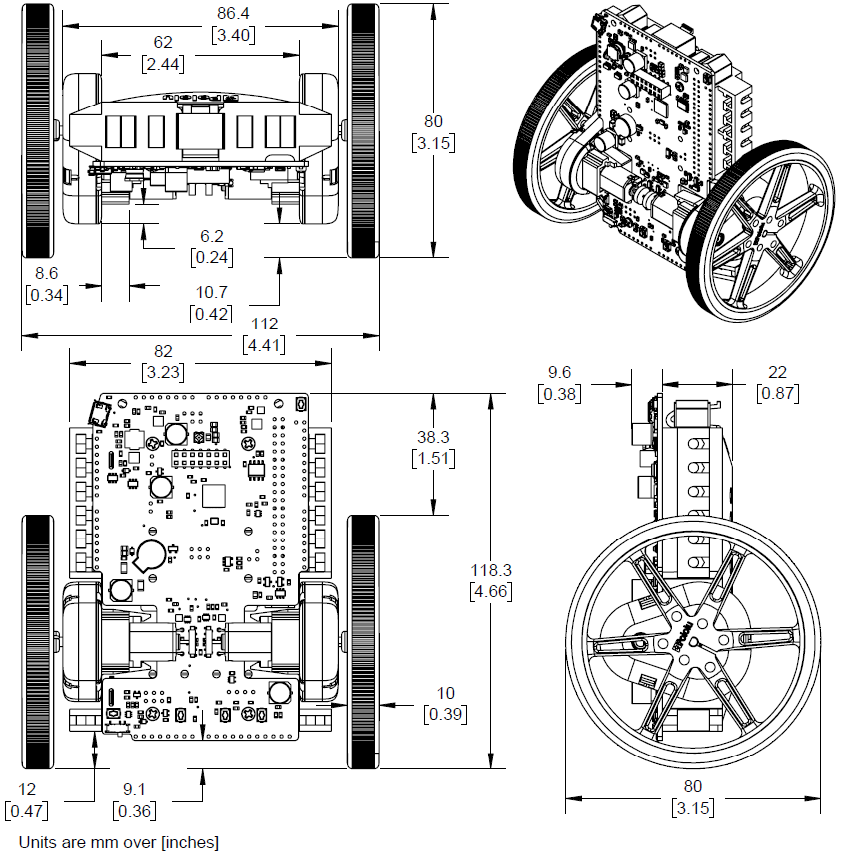 |
| Dimensions du robot d'équilibrage Balboa 32U4 avec roues de 80 × 10 mm. |
|---|
Protection contre les chutes
Lorsque vous utilisez le Balboa comme robot d'équilibrage, il est important de protéger l'électronique des chutes brutales.hat pourrait les endommager. En général, nous recommandons de faire fonctionner le Balboa sur des surfaces molles, telles que les tapis, et cela aide à installer la cage de pare-chocs incluse afinhat il y a quelque chose à toucher le sol avant l'électronique (voir les photos dans la section "Contenu du kit" ci-dessus). Vous pouvez également fabriquer vos propres pare-chocs de protection si vous le souhaitez, et les images ci-dessous montrent deux de ces exemples faits maison :
|
|

Nous avons fait les bras dans l'image de gauche disponible sur Thingiverse afin que ceux qui ont accès aux imprimantes 3D puissent imprimer les leurs.
Plus d'Infos
| MARQUE | pololu |
|---|