





Pilote de moteur double TB9051FTG pour Raspberry Pi (Assemblé)
23,00 €
Avertissez-moi lorsque l'article est disponible.
- Description
- Plus d'Infos
Description
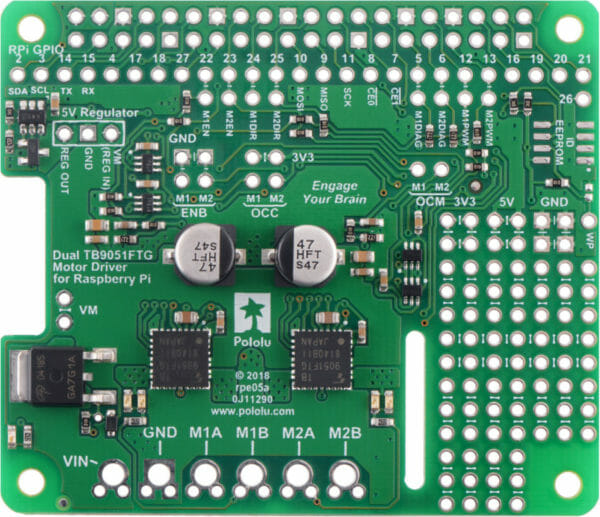
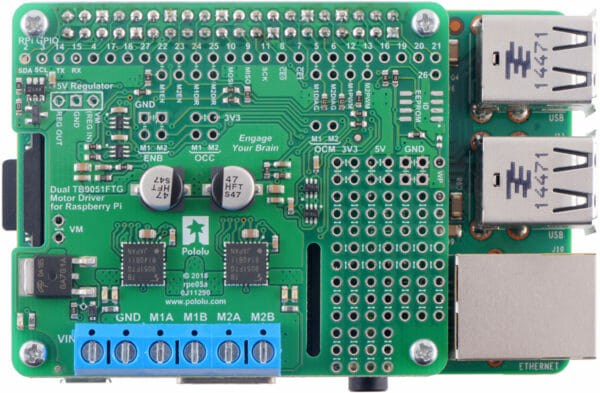
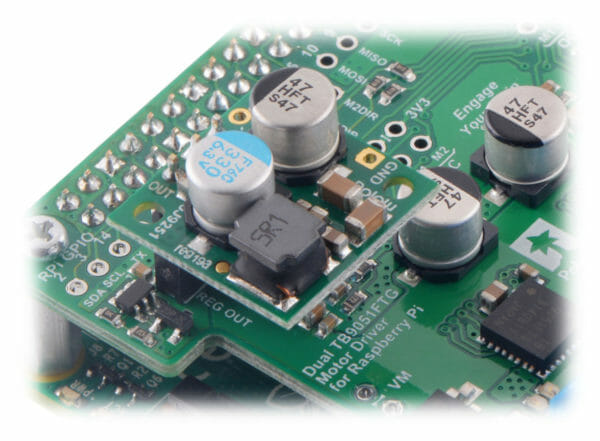
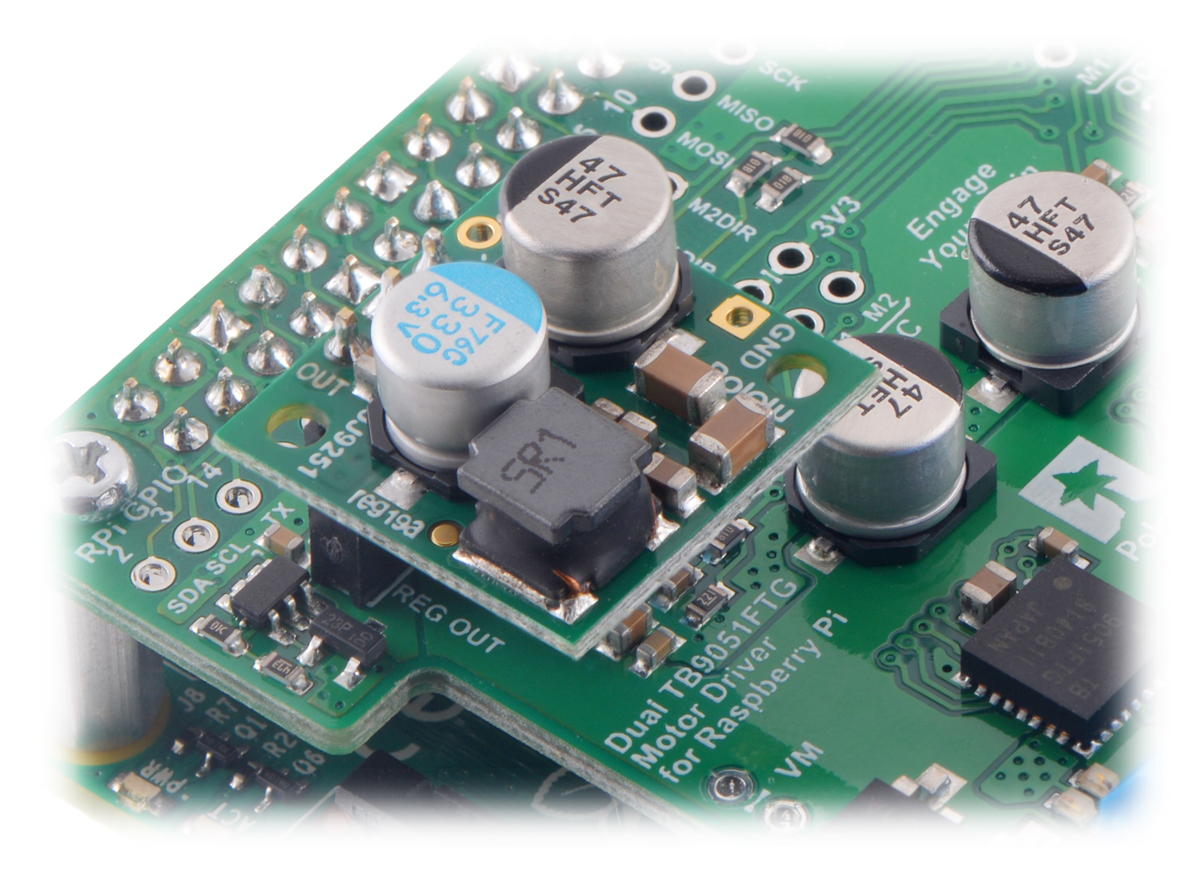
Cette carte d'extension permet un Raspberry Pi B+, Pi A+, Pi 2 ou Pi 3 pour piloter une paire de moteurs DC à balais. Ses deux pilotes de moteur TB9051FTG fonctionnent de 4.5 V à 28 V et peuvent fournir un courant continu de 2.6 A (5 A en crête) par moteur. Les mappages de broches par défaut facilitent la prise en main de notre logiciel fourni, mais la carte expose également la plupart des broches d'E/S des puces de pilote pour des applications plus spécialisées. Cette version est livrée entièrement assemblé avec connecteurs soudés.
Cette carte d'extension de pilote de moteur et sa bibliothèque Python correspondante facilitent le contrôle d'une paire de moteurs CC bidirectionnels à balais avec un Raspberry Pi (Modèle B + ou plus récent), y compris le Pi 3 modèle B + et Modèle A +. La carte d'extension utilise une paire de pilotes de moteur Toshiba TB9051FTG, qui fonctionnent de 4.5 à 28 V et peuvent fournir 2.6 A en continu par canal (jusqu'à 5 A par canal pendant quelques secondes). Les autres caractéristiques comprennent un circuit de protection de batterie inversé et des portes logiques that réduire le nombre de broches d'E/S nécessaires pour contrôler efficacement les circuits intégrés du pilote. Il est disponible soit sous forme de kit partiel, avec embase femelle et borniers inclus mais non soudés, ou entièrement assemblé avec ces connecteurs soudés au PCB.
La configuration par défaut de la carte utilise six broches GPIO pour contrôler les pilotes de moteur, en utilisant le Raspberry Piles sorties PWM matérielles de et il utilise deux broches supplémentaires pour lire les sorties d'état des pilotes. Cependant, les mappages de broches peuvent être personnalisés si les valeurs par défaut ne conviennent pas, et d'autres entrées et sorties de contrôle des circuits intégrés TB9051FTG sont accessibles sur la carte pour des applications plus avancées.
 |
Le tableau correspond au Raspberry Pi HAT (Matériel attaché en haut) spécification mécanique, bien qu'il ne soit pas conforme à la HAT spécifications en raison de l'absence d'une EEPROM ID. (Une empreinte pour ajouter votre propre EEPROM est disponible pour les applications où une serait utile; des tractions sur SDA, SCL et WP sont fournies.) ne sauraient pratique d'utiliser cette carte d'extension avec l'original Raspberry Pi Modèle A ou modèle B en raison de différences dans leur brochage et leur facteur de forme.
Pour la commande de moteurs plus puissants avec un Raspberry Pi, considérez notre Cartes d'extension pour deux pilotes de moteur haute puissance G2, et pour contrôler les moteurs de faible puissance avec une carte plus petite, considérez notre Pilote de moteur double DRV8835 or Pilote de moteur double MAX14870 trousses. Nous avons aussi un semblable double blindage TB9051FTG en Arduinos et cartes compatibles Arduino et une base support TB9051 unique pour ceux qui utilisent un contrôleur différent ou avec des contraintes d'espace plus serrées.
Fonctionnalités:
- Pilote de moteur à pont en H à double canal sous la forme d'un Raspberry Pi carte d'extension
- Large plage de tension de fonctionnement : 4.5 V à 28 V
- Courant de sortie: 2.6 A en continu (5 A en crête) par moteur
- La fonction de hachage automatique du courant permet d'éviter la surchauffe en réduisant gracieusement la puissance plutôt qu'en s'arrêtant brusquement
- Fonctionnement PWM jusqu'à 20 kHz, ce qui est ultrasonique et permet un fonctionnement plus silencieux du moteur
- Les voyants lumineux du moteur indiquent what les sorties font même quand aucun moteur n'est connecté
- La carte peut éventuellement alimenter le Raspberry Pi base grâce à un régulateur ajouté comme le D24V10F5 or D24V22F5 (non incluses)
- Librairie Python facilite la prise en main de cette carte comme carte d'extension de pilote de moteur
- Les mappages de broches GPIO peuvent être personnalisés si les mappages par défaut ne conviennent pas
- Les broches de commande de moteur restantes sont exposées pour une utilisation avancée
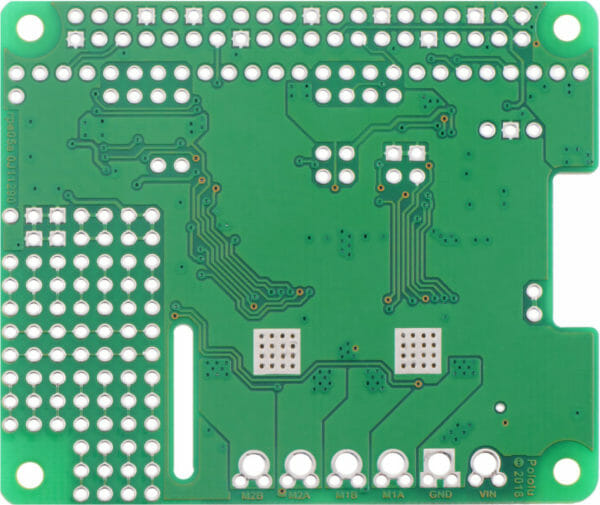
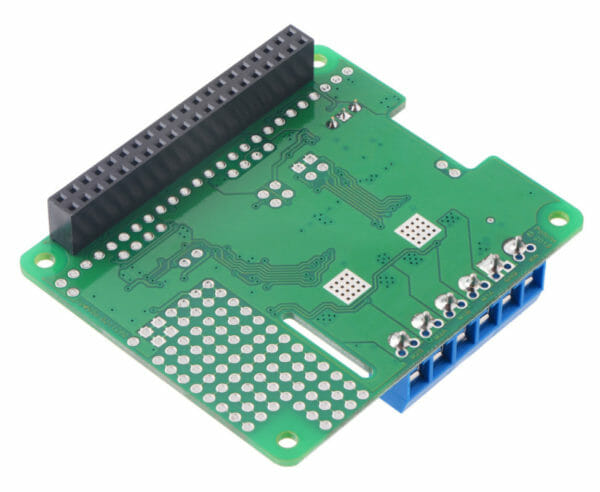
- Plaques de terre soudables exposées sous les circuits intégrés du pilote au bas du PCB
- Protection contre l'inversion de tension sur l'alimentation du moteur
- Pilotes robustes:
- Fonctionnement transitoire (<500 ms) jusqu'à 40 V
- Verrouillage de sous-tension et protection contre les surintensités/courts-circuits et les surchauffes
- La sortie d'erreur active faible indique une condition de surintensité, de surchauffe, de sous-tension ou de surtension VCC
- Espace de prototypage pour une construction plus facile / plus propre de circuits personnalisés
Détails pour item #2762
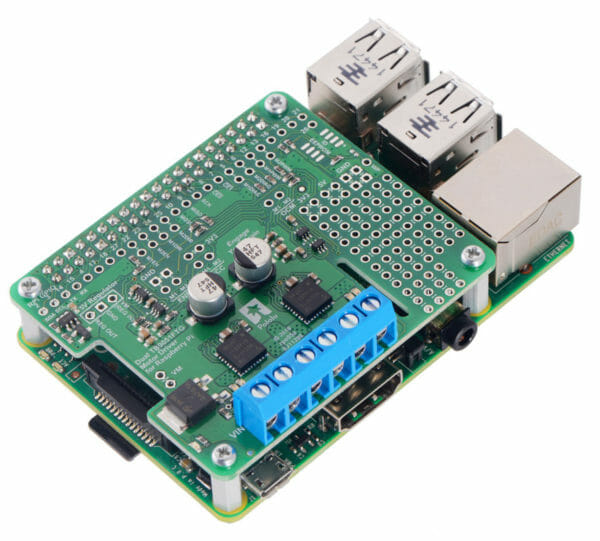
Cette version du pilote de moteur est entièrement assemblé, avec une Embase femelle 2 × 20 broches 0.1 ″ (pour se connecter au Raspberry Pil'en-tête GPIO à 40 broches) et une bande à six broches de Borniers 5 mm (pour les connexions du moteur et de l'alimentation) soudés. (Si c'est article # 2761 pour une version kit avec connecteurs inclus mais non soudés.)
 |
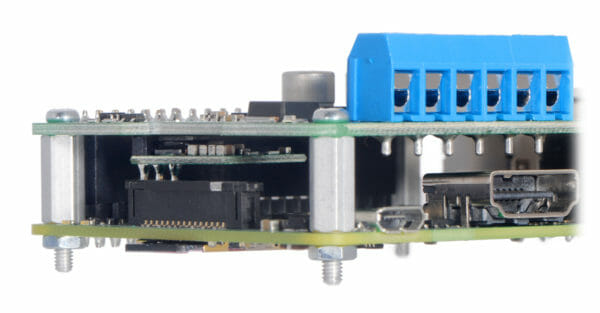
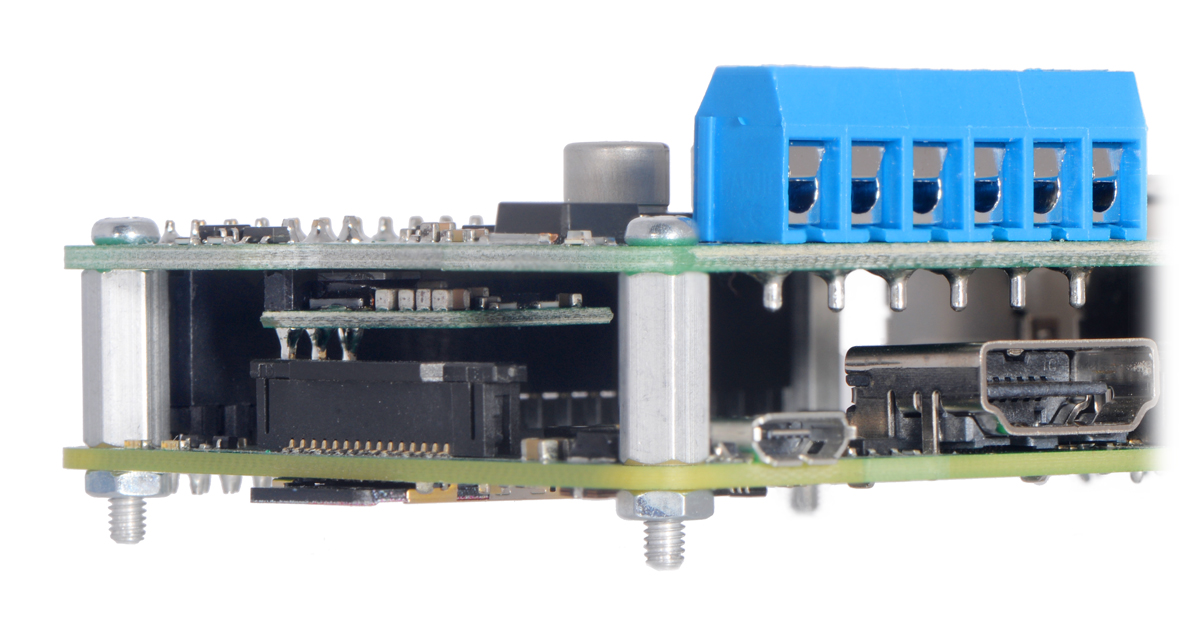
Le pilote de moteur est livré avec un ensemble de quatre M2.5 entretoises (longueur 11 mm), des viset des noisettes that peut être utilisé pour fixer la carte au Raspberry Pi à la bonne hauteur pour le connecteur GPIO. Si vous décidez de ne pas utiliser les entretoises, veillez à ne pas laisser le moteur et les connexions d'alimentation court-circuiter contre le Raspberry Piconnecteur HDMI de.
Blocs de court-circuit et 0.1 ″ bad headers (non inclus) peut être utilisé pour apporter certaines des modifications optionnelles les plus avancées à la carte, telles que le remappage des broches de commande.
A Raspberry Pi is non inclus.
Utilisation de la carte de pilotage du moteur
Cette section explique comment utiliser la carte d'extension de pilote de moteur double TB9051FTG et fournit des informations de base sur les broches de pilote de moteur pour vous aider à démarrer. Cependant, nous vous encourageons fortement à consulter le Fiche technique TB9051FTG (2 Mo pdf) pour des descriptions détaillées des broches, des tables de vérité et des caractéristiques électriques. Cette carte d'extension est essentiellement une carte de dérivation pour deux circuits intégrés de commande de moteur TB9051FTG avec des circuits logiques supplémentaires pour simplifier le contrôle du moteur. La fiche technique est donc votre meilleure ressource pour répondre aux questions non couvertes ici.
 |
Dans l'état par défaut de la carte, les sorties du pilote de moteur et le Raspberry Pi sont alimentés séparément, bien qu'ils partagent un terrain commun. Les alimentations logiques 3.3 V et 5 V de la carte sont fournies par le Raspberry Pi. Lorsqu'il est utilisé de cette façon, le Raspberry Pi doit être alimenté via sa prise USB Micro-B, et la carte de commande du moteur doit être alimentée en 4.5 V à 28 V via ses larges plots VIN et GND. Cependant, la carte de commande du moteur fournit un ensemble de trois trous traversants où vous pouvez facilement connecter un régulateur de tension approprié, permettant à l'alimentation du moteur d'alimenter également le Raspberry Pi (voir le Alimentant le Raspberry Pi de la carte de pilotage du moteur section ci-dessous).
Un circuit de protection contre les inversions de tension permet d'éviter d'endommager la carte dans case l'alimentation du moteur est connectée à l'envers. La tension d'entrée protégée contre l'inversion est accessible pour une utilisation dans d'autres circuits via les deux broches étiquetées VM sur le côté gauche de la carte.
La carte comprend des portes logiques that activer le fonctionnement du variateur/frein des pilotes TB9051FTG avec seulement deux broches de commande par moteur (PWM et direction). Étant donné que le fonctionnement en entraînement/frein fournit généralement une relation plus linéaire entre le cycle de service PWM et la vitesse du moteur que le fonctionnement en entraînement/en roue libre, nous recommandons généralement d'utiliser le fonctionnement en entraînement/frein lorsque cela est possible.
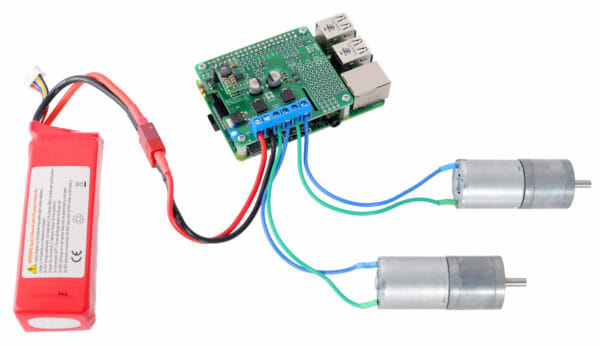
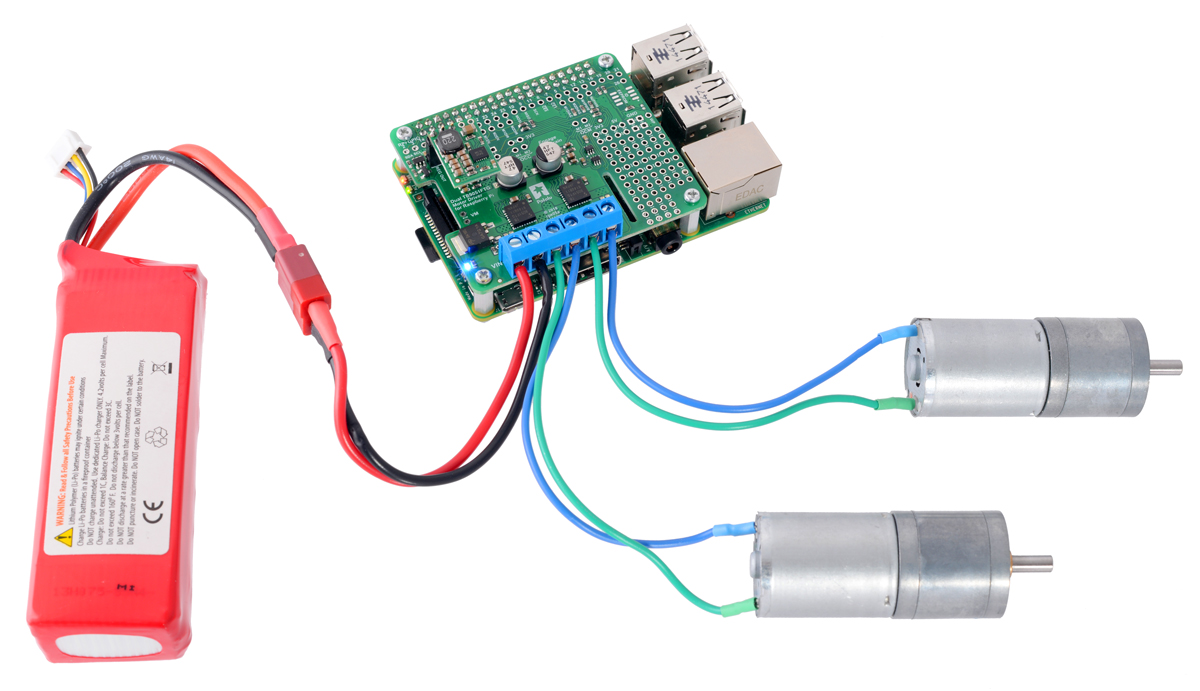 |
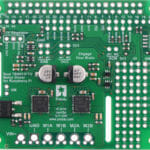
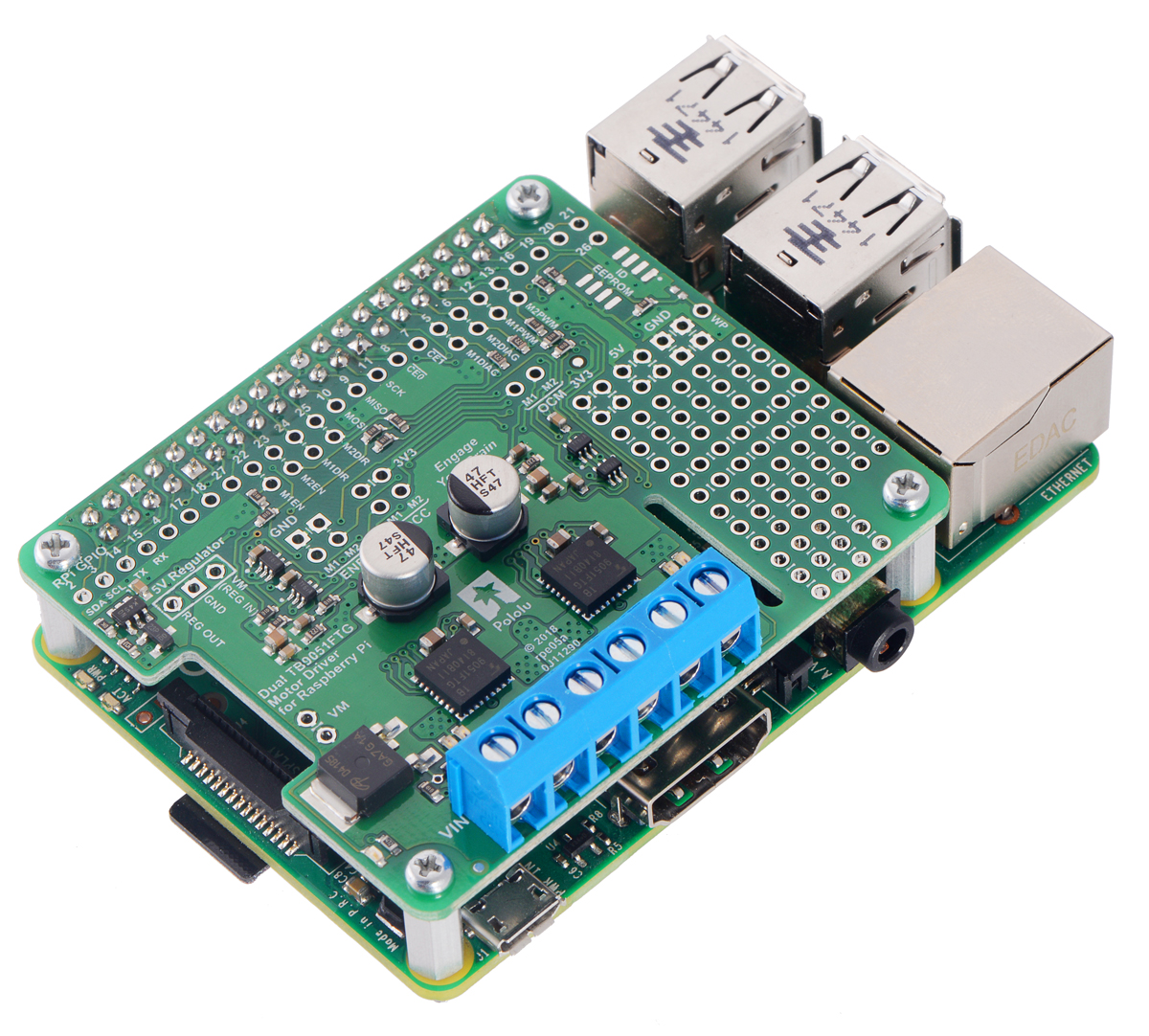
| Pilote de moteur double TB9051FTG pour Raspberry Pi contrôler une paire de moteurs. |
|---|
Mappages de broches par défaut
Ce tableau montre comment le Raspberry PiLes broches GPIO de 's sont utilisées pour l'interface avec les pilotes de moteur :
| RPi broche GPIO |
Goupille d'entraînement du moteur | Description |
|---|---|---|
| 5 | Moteur 1 DIAG | Sortie d'erreur de diagnostic : lorsque le pilote fonctionne normalement, cette broche doit être tirée vers le haut par le Raspberry Pi. En cas de défaillance du pilote, le circuit intégré du pilote entraîne DIAG à l'état bas. Si l'une des broches de désactivation (EN ou ENB) désactive les sorties, DIAG sera également faible. |
| 6 | Moteur 2 DIAG | |
| 12 | Moteur 1 PWM | Entrée vitesse moteur : Un signal PWM (modulation de largeur d'impulsion) sur cette broche correspond à une sortie PWM sur les sorties moteur du pilote correspondant. Lorsque cette broche est basse, le moteur freine bas. Quand il est haut, le moteur est en marche. La fréquence PWM maximale autorisée est de 20 kHz. |
| 13 | Moteur 2 PWM | |
| 22 | Moteur 1 FR | Activer la saisie : Raspberry Pi tire cette broche vers le bas par défaut, désactivant les sorties du moteur en les réglant sur une impédance élevée. FR doit être poussé vers le haut pour activer le pilote du moteur. |
| 23 | Moteur 2 FR | |
| 24 | Moteur 1 DIR | Entrée sens du moteur : lorsque DIR est bas, le courant du moteur passe de la sortie A à la sortie B ; lorsque DIR est élevé, le courant circule de B vers A. |
| 25 | Moteur 2 DIR |
Table de vérité simplifiée du contrôle moteur
Ce tableau montre comment les entrées de commande des pilotes affectent les sorties du moteur :
| Contributions | Sortie | ||||
|---|---|---|---|---|---|
| EN | DIR | PWM | MXA | MxB | mode de fonctionnement |
| 1 | 0 | PWM | PWM (H/L) | L | avance / frein à la vitesse PWM% |
| 1 | 1 | PWM | L | PWM (H/L) | inverser / freiner à la vitesse PWM% |
| 1 | X | 0 | L | L | frein bas (sorties à la terre) |
| 0 | X | X | Z | Z | côte (sorties off) |
Remappage des broches
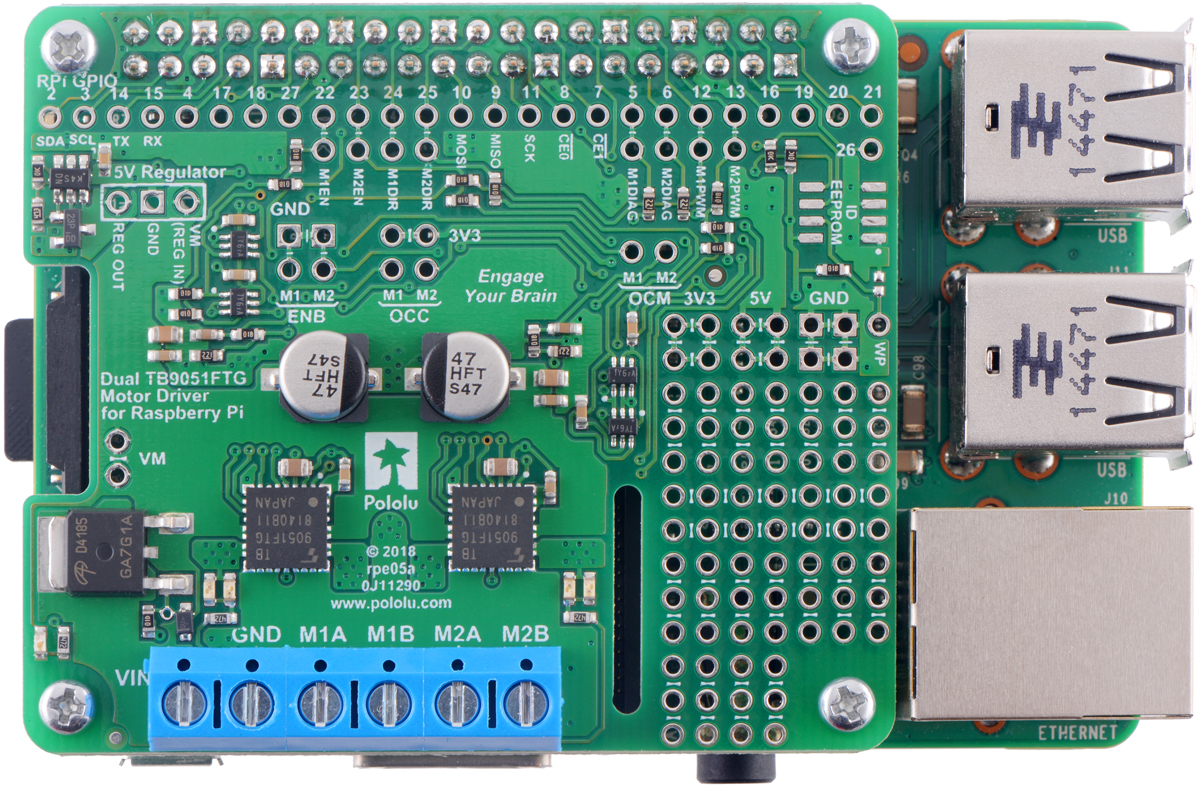
Toutes les Raspberry PiLes broches GPIO du s sont réparties le long d'une rangée de trous traversants numérotés juste en dessous du connecteur GPIO à 40 broches. Chaque broche GPIO utilisée par la carte est connectée à partir de cette rangée à la broche du pilote de moteur correspondante par une trace sur la face supérieure de la carte couvrant la paire de trous. Si vous souhaitez remapper l'une de ces broches de pilote de moteur, vous pouvez couper sa trace avec un couteau, puis faire passer un fil du trou inférieur à une nouvelle broche GPIO.
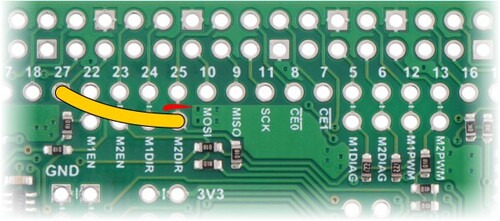 |
| Pilote de moteur double TB9051FTG pour Raspberry Pi exemple de remappage : déplacement de M2DIR de la broche GPIO 25 à la broche 27. |
|---|
Notes that les mappages de broches par défaut ont été choisis pour that le Raspberry Piles pull-ups et pull-downs GPIO par défaut correspondent à la direction dans laquelle les broches du pilote de moteur sont ou devraient être tirées (vers le haut pour DIAG, vers le bas pour les autres); si vous remapper les broches du pilote de moteur sans y prêter attention, vous pourriez rencontrer des problèmes avec les broches tirées dans le mauvais sens. Voir le Raspberry Pi Documentation pour en savoir plus sur les états GPIO par défaut.
Utilisation de broches TB9051FTG supplémentaires
Les autres entrées et sorties du TB9051FTG ne sont pas connectées au Raspberry Pi, mais ils sont accessibles par leurs propres trous traversants dans case vous souhaitez les utiliser dans une application plus avancée des pilotes de moteur. La carte relie certaines des entrées hautes ou basses par des traces découpables, de la même manière que les broches remappables sont connectées, et vous devez couper la trace avant de connecter chaque entrée à quoi que ce soit d'autre. Ce tableau montre la configuration par défaut des broches supplémentaires :
| Goupille d'entraînement du moteur | Description | Configuration par défaut à bord |
|---|---|---|
| ENB | Entrée de validation inversée | Lié bas (activé) par trace découpable |
| OCC | Entrée de configuration de réponse de surintensité | Tiré en interne bas (le pilote reste désactivé après une condition de surintensité) |
| OCM | Sortie moniteur de courant | Connecté à la résistance de détection et au filtre passe-bas pour produire env. 500 mV / A (actif uniquement lorsque le pont en H est en marche) via un filtre RC intégré |
Pour plus d'informations sur ces broches et leur utilisation, reportez-vous à la Fiche technique TB9051FTG (2MB pdf).
Alimentant le Raspberry Pi de la carte de pilotage du moteur
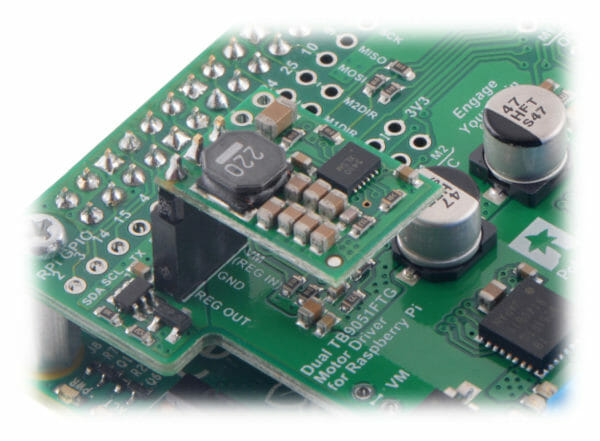
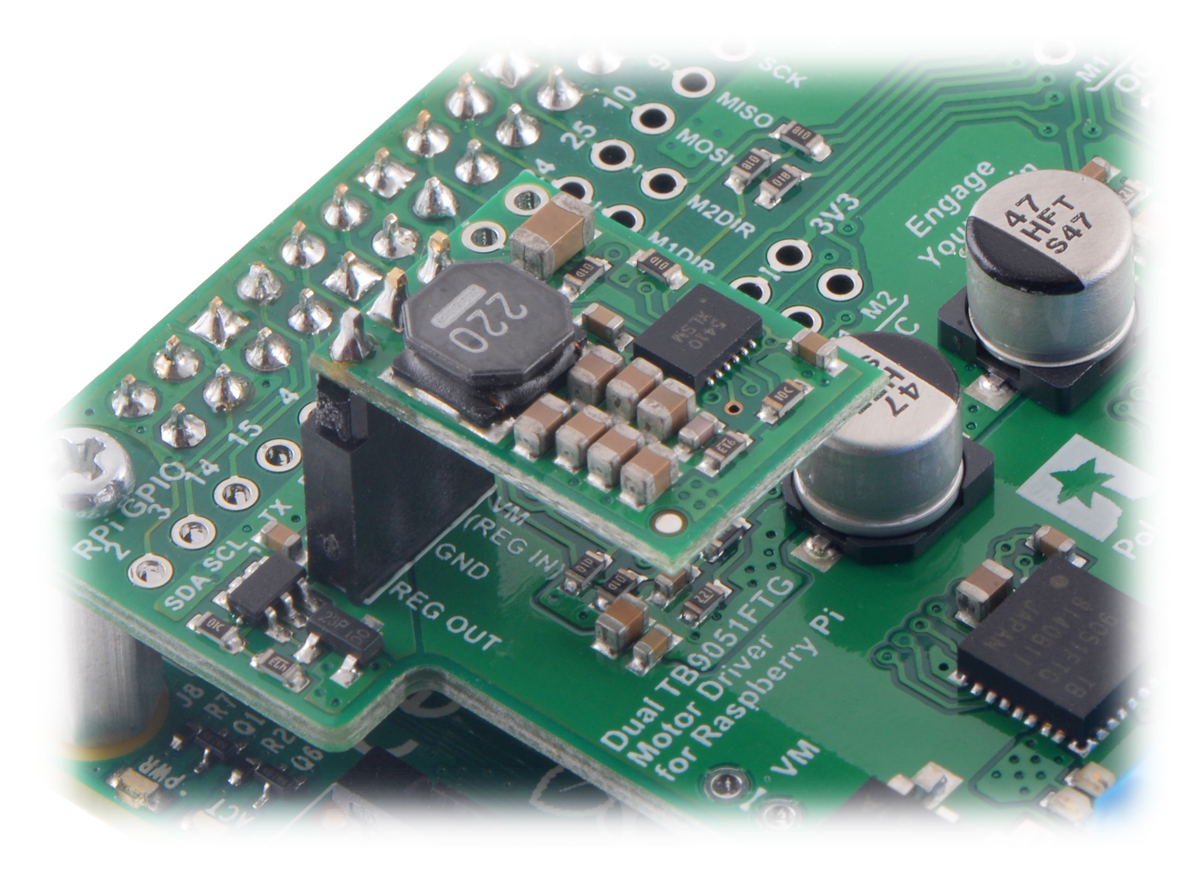
Sur le côté gauche de la carte d'extension se trouve un ensemble de trois broches entourées d'une boîte étiquetée « 5V Regulator ». La broche "VM (REG IN)" permet d'accéder à la tension d'alimentation du moteur de la carte de commande après protection contre les inversions de tension, tandis que la broche "REG OUT" est connectée à la Raspberry PiLe rail d'alimentation 5 V via un circuit de diode idéal. Si un régulateur de tension approprié est connecté à ces trois broches, il peut générer 5 V pour alimenter le Raspberry Pi de la tension d'alimentation du moteur de la carte.
Nous vous suggérons d'utiliser notre D24V10F5 or D24V22F5, qui fonctionnent à des tensions d'entrée dépassant les 28 V maximum du TB9051FTG (voir ci-dessous pour plus de détails sur le choix), et peuvent fournir jusqu'à 500 mA ou 1 A de courant, respectivement, au Raspberry Pi.
Lors de l'ajout d'un régulateur de tension sur la carte de pilotage du moteur, veillez à l'orienter correctement : remarque that La broche « VM (REG IN) » de la carte de commande du moteur doit se connecter à la broche VIN du régulateur, tandis que la broche VOUT du régulateur doit se connecter à la broche REG OUT de la carte de commande du moteur.
Il y a quelques considérations à garder à l'esprit lors de la « réalimentation » du Raspberry Pi à travers un régulateur de tension de cette manière :
- L'alimentation de votre moteur doit être une tension acceptable à la fois pour le régulateur et les circuits intégrés de commande TB9051FTG.
- Le régulateur doit être en mesure de gérer les besoins en énergie du Raspberry Pi. Le modèle B + utilise généralement quelques centaines de milliampères à 5 V, bien que sa consommation de courant puisse dépasser 1 A s'il alimente également des périphériques USB et d'autres périphériques. Bien qu'un régulateur linéaire comme un 7805 puisse tenir dans l'emplacement de montage du régulateur, il pourrait générer une chaleur excessive ou s'arrêter à des tensions d'entrée et des courants de sortie plus élevés. Nous vous recommandons d'utiliser un régulateur à découpage comme ceux mentionnés ci-dessus.
Le circuit de diode idéal sur cette carte empêche le courant inverse de circuler dans l'alimentation 5 V de la carte de commande du moteur si le Raspberry Pi est alimenté séparément (par exemple, via sa prise d'alimentation USB). Cependant, à commencer par le Raspberry Pi 3 Modèle B +, il n'y a pas de circuit de diode idéal correspondant sur le Raspberry Pil'entrée d'alimentation USB de , il est donc possible pour la carte de commande de réalimenter un adaptateur d'alimentation USB via le Raspberry Pi. Par conséquent, nous ne recommandons pas de connecter une alimentation USB externe à la Raspberry Pi alors qu'il est alimenté par le pilote du moteur.
Le backfeeding n'est pas un problème avec les anciens Raspberry Pi versions, qui ont un circuit de diode sur l'entrée d'alimentation USB. Avec Raspberry Pi versions antérieures au Pi 3 B +, il est prudent d'avoir une alimentation différente connectée au Raspberry Pi via sa prise USB tandis que le module complémentaire de pilote de moteur et le régulateur sont connectés et alimentés.
La D24V10F5 peut fournir jusqu'à 1 A de courant au Raspberry Pi et devrait fonctionner pour les modèles à faible puissance (comme le A+) avec des charges plus légères. Il peut être soudé directement à la carte de commande du moteur avec un tête masculine pour établir une connexion compacte et permanente :
|
|

ou branché sur un Connecteur femelle à 3 broches soudé à la carte pour une configuration plus modulaire :
 |
La D24V22F5 peut fournir jusqu'à 2.5 A et convient mieux à des performances plus élevées Raspberry Pi modèles (comme le Pi 3 B +), en particulier avec des charges de travail exigeantes ou lors de l'alimentation de nombreux périphériques. En raison de sa plus grande taille, il doit être connecté via des embases ou des fils plus longs pour éviter toute interférence avec les borniers.
 |
La page FAQ sur le Raspberry Pi le site Web contient plus d'informations sur Raspberry Pi exigences en matière de puissance.
Considérations relatives à la dissipation de puissance dans le monde réel
Le TB9051FTG commencera à couper son courant de sortie à un seuil typique de 6.5 A. Cependant, la puce elle-même surchauffera généralement à des courants plus faibles. Dans nos tests, nous avons trouvé that la puce n'a pu fournir 5 A que quelques secondes avant que la protection thermique de la puce ne s'enclenche ; un courant continu d'environ 2.6 A par canal a été maintenu pendant de nombreuses minutes sans déclencher de limitation de courant thermique ni d'arrêt en cas de surchauffe. Le courant réel que vous pouvez fournir dépendra de la façon dont vous pouvez garder le moteur au frais. La carte de circuit imprimé du pilote est conçue pour aider à cela en extrayant la chaleur de la puce du pilote du moteur. PWMing le moteur introduira un chauffage supplémentaire proportionnel à la fréquence.
Contrairement aux ponts en H typiques, le TB9051FTG a une caractéristique that lui permet de réduire gracieusement la limite de courant maximale lorsque la température de la puce approche de sa limite. Cela signifie that si vous poussez la puce près de sa limite, vous verrez moins de puissance au moteur, mais cela pourrait vous permettre d'éviter un arrêt complet.
Ce produit peut obtenir chaudes assez pour vous brûler bien avant que la puce ne surchauffe. Faites attention lorsque vous manipulez ce produit et les autres composants qui y sont connectés.
Diagramme schématique
 |
Ce schéma est également disponible en pdf téléchargeable : Pilote de moteur double TB9051FTG pour Raspberry Pi schématique (269k pdf).
Plus d'Infos
| MARQUE | pololu |
|---|---|
| CARACTERISTIQUES |