


Support de pilote de moteur pas à pas AMIS-30543
20,99 €
- Description
- Plus d'Infos
Description
Ce produit est une carte de support ou une carte de dérivation pour le microcontrôleur de moteur pas à pas AMIS-30543 d'ON Semiconductor ; nous vous recommandons donc de lire attentivement la fiche technique AMIS-30543 (495k pdf) avant d'utiliser ce produit. Ce pilote de moteur pas à pas vous permet de contrôler un moteur pas à pas bipolaire jusqu'à 3 A de courant de sortie par bobine (voir la section Considérations sur la dissipation de puissance ci-dessous pour plus d'informations). Voici quelques-unes des principales caractéristiques du tableau :
Interface standard de contrôle de pas et de direction
Interface SPI pour la configuration des paramètres (par exemple, mode pas à pas, limite de courant, veille) et la lecture des registres d'état
Sortie vitesse et angle de charge that peut être utilisé pour la détection de décrochage ou le contrôle en boucle fermée du couple et de la vitesse en fonction de l'angle de charge
Onze modes différents: pas complet (phase 1 non compensée, compensée ou phase 2 compensée), demi-étape (non compensée ou compensée), étape 1 / 4, étape 1 / 8, étape 1 / 16 Étape 1 / 32, étape 1 / 64 et étape 1 / 128
La commande de courant programmable SPI (de 132 mA à 3 A) permet à votre microcontrôleur d'ajuster la limite de courant de crête à la volée car plus ou moins de couple ou de vitesse est nécessaire
Contrôle de hachage intelligent that sélectionne automatiquement le mode de décroissance actuel correct (décroissance rapide ou décroissance lente)
PWM à faible EMI avec pentes de tension sélectionnables par SPI
Compatible avec les microcontrôleurs 5V et 3.3V
Régulateur 5V intégré that peut être utilisé pour alimenter un microcontrôleur externe
Fonction de surveillance intégrée
Détection de bobine ouverte
Un avertissement thermique indique que le conducteur est proche de la température d'arrêt thermique
État de surintensité et arrêt (protection contre les courts-circuits à la terre et les charges courtes)
Protection contre la tension inverse
Remarque : ce pilote doit être activé et configuré via son interface SPI à la mise sous tension, votre microcontrôleur doit donc être capable d'agir en tant que maître SPI (avec un périphérique SPI ou un logiciel SPI).
Matériel inclus
Ce produit est livré avec tous les composants à montage en surface, y compris le circuit intégré de pilote AMIS-30543, installés comme indiqué sur l'image du produit. Cependant, une soudure est requise pour l'assemblage des pièces traversantes incluses. Les pièces traversantes suivantes sont incluses :
Un breakaway 1 × 20 broches 0.1 ? en-tête masculin
Trois borniers à 2 broches de 3.5 mm (pour l'alimentation de la carte et les sorties moteur)
Un 0.1 ? bloc de court-circuit (pour connecter IOREF à la broche VDD voisine)
Le 0.1 ? l'en-tête mâle peut être cassé ou coupé en plus petits morceaux comme vous le souhaitez et soudé dans les plus petits trous traversants. Ces en-têtes sont compatibles avec les maquettes sans soudure, 0.1 ? connecteurs femelles et nos câbles de démarrage premium et pré-sertis. Les borniers peuvent être soudés dans les trous les plus larges pour permettre des connexions temporaires pratiques de câbles d'alimentation et de moteurs pas à pas sans terminaison. Vous pouvez également souder les câbles de votre moteur et autres connexions directement à la carte pour une installation des plus compactes.
Utiliser le pilote
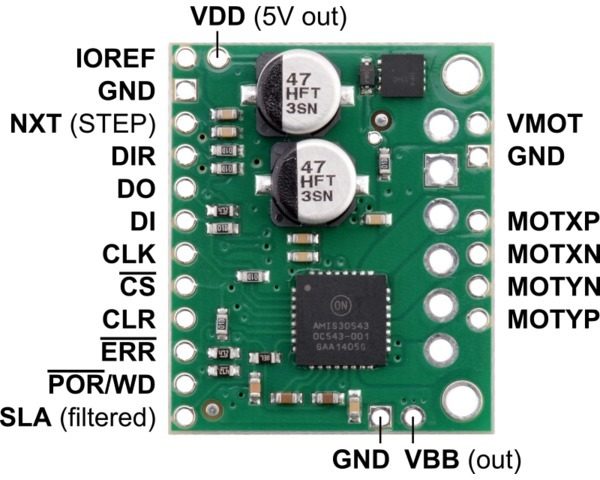
Brochage
PIN
Description
VMOT
Connexion d'alimentation de la carte 6 V à 30 V protégée contre l'inversion. Remarque : le courant VDD disponible est réduit pour les tensions d'entrée inférieures à 8 V et le mode veille n'est pas disponible pour les tensions d'entrée inférieures à 9 V.
VBB
Cette broche donne accès à l’alimentation du moteur après le MOSFET à protection contre les tensions inverses (voir le schéma de la carte ci-dessous). Il peut être utilisé pour alimenter d’autres composants du système sous tension. Il est généralement conçu comme une sortie, mais il peut également être utilisé pour alimenter la carte.
GND
Points de connexion à la terre pour l'alimentation du moteur et la référence de terre de commande. La source de commande et le pilote du moteur doivent partager une masse commune.
MOTXP
Sortie moteur : ?positive ? bobine de fin de phase X.
MOTXN
Sortie moteur : ?Négative ? bobine de fin de phase X.
MOTYP
Sortie moteur : ?positive ? bobine de fin de phase Y.
MOTYN
Sortie moteur : ?Négative ? bobine de fin de phase Y.
VDD (sortie 5 V)
La carte est alimentée par un régulateur interne 5V, et cette broche donne accès à la sortie régulée 5V. Cela peut être utilisé pour alimenter la broche IOREF voisine lors de l'utilisation de cette carte dans des systèmes 5V, et il peut être utilisé pour alimenter un microcontrôleur externe. Lorsque le VMOT est supérieur à 8 V, environ 30 mA sont disponibles pour les composants externes ; lorsque VMOT est inférieur à 8 V, le courant disponible chute à moins de 10 mA.
IOREF
Toutes les sorties de signal de la carte (sauf SLA) sont des sorties à drain ouvert that sont tirés vers le haut à IOREF, donc cette broche doit être alimentée avec la tension logique du système de contrôle (par exemple 3.3 V pour une utilisation dans des systèmes 3.3 V). Pour plus de commodité, il peut être connecté à la broche VDD voisine lorsqu'il est utilisé dans un système 5V.
NXT
Les changements sur cette entrée déplacent le courant du moteur d'un cran vers le haut ou vers le bas dans la table du traducteur (même lorsque le moteur est désactivé). Le bord that déclenche l'étape dépend du bit de configuration de polarité NXT, qui peut être modifié via l'interface SPI (front montant par défaut).
DIR
Entrée that détermine le sens de rotation. La direction peut également être contrôlée via l'interface SPI.
DO
Sortie de données SPI. (Cette broche est aussi souvent appelée ? MISO ?.)
DI
Entrée de données SPI. (Cette broche est aussi souvent appelée ? MOSI ?.)
CLK
Entrée d'horloge SPI.
CS
Entrée de sélection de puce SPI. Les transitions logiques sur cette broche sont nécessaires pour la communication SPI, même s'il s'agit du seul périphérique sur le bus SPI.
CLR
Puce de réinitialisation d'entrée. Un niveau logique haut sur cette entrée efface tous les registres internes, sauf en mode veille.
ERR
Sortie d'erreur. Cette broche est basse pour indiquer that une condition d'erreur s'est produite. L'erreur spécifique peut être déterminée en utilisant l'interface SPI pour vérifier les indicateurs d'erreur.
POR / WD
Réinitialisation à la mise sous tension / sortie de la fonction de chien de garde. Cette broche fournit un signal actif-bas that peut être utilisé comme entrée de réinitialisation pour un microcontrôleur externe.
SLA (filtré)
Sortie SLA (vitesse et angle de charge) après un filtre passe-bas. Le résultat est une tension analogique entre 0 V et 5 V that indique le niveau de la tension contre-électromotrice du moteur. Ce signal peut être utilisé pour la détection de décrochage ou le contrôle en boucle fermée du couple et de la vitesse en fonction de l'angle de charge. Remarque : Étant donné que la sortie de cette broche est comprise entre 0 V et 5 V, quel que soit l'IOREF, des précautions supplémentaires doivent être prises lors de la connexion de cette broche à un périphérique de 3.3 V (par exemple, en la faisant passer à travers un diviseur de tension approprié).
Schéma de câblage minimal général
Schéma de câblage minimal pour la connexion d'un microcontrôleur à un support de pilote de moteur pas à pas AMIS-30543.
Alors que l'AMIS-30543 permet de contrôler un moteur pas à pas via une interface simple étape (NXT) et direction (DIR), il doit d'abord être activé et configuré via son interface SPI. Cela signifie that le microcontrôleur de contrôle doit être capable d'agir en tant que maître SPI (avec un périphérique SPI ou un logiciel SPI), et il doit être connecté aux broches DI, CLK et CS. Bien que les broches DO et ERR ne soient pas nécessaires pour utiliser ce pilote, il est généralement recommandé de les utiliser pour surveiller les conditions d'erreur.
Schéma de câblage minimal (systèmes 5 V uniquement)
Schéma de câblage minimal pour connecter un microcontrôleur avec une tension logique de 5 V à un support de pilote de moteur pas à pas AMIS-30543.
L'AMIS-30543 dispose d'un régulateur interne 5 V that peut être utilisé pour fournir IOREF cases où la carte est utilisée dans les systèmes 5 V. Ce régulateur interne peut également être utilisé pour fournir la tension logique du microcontrôleur externe si le régulateur peut fournir le courant requis, dans lequel case il y aurait un fil de l'AMIS-30543 VDD au microcontrôleur VDD dans le schéma ci-dessus, et l'alimentation logique ? la boîte ne serait pas présente.
Bibliothèque Arduino et exemple de code
Contrôle d'un pilote de moteur pas à pas AMIS-30543 avec un MiniX compatible avec Arduino #3104 A-Star 32U4 Mini SV.
Si vous débutez avec l'AMIS-30543 ou les moteurs pas à pas en général, notre bibliothèque Arduino AMIS-30543 peut vous aider à démarrer. La bibliothèque fournit des fonctions de base pour configurer et faire fonctionner le pilote à l'aide d'un contrôleur Arduino ou compatible Arduino. Il donne également accès à de nombreuses fonctionnalités avancées du conducteur et comprend des exemples de croquis that vous montrer comment les utiliser.
Considérations de dissipation de puissance
Le circuit intégré de pilote AMIS-30543 a un courant nominal maximum de 3 A par bobine, mais le courant réel que vous pouvez fournir dépend de la façon dont vous pouvez garder le circuit intégré au frais. La carte de circuit imprimé du support est conçue pour extraire la chaleur du circuit intégré, mais pour fournir plus d'environ 1.8 A par bobine en continu, un dissipateur thermique ou une autre méthode de refroidissement est nécessaire. Cependant, il est possible d'utiliser la limite de courant configurable SPI pour fournir sélectivement des courants plus élevés que cela pendant de courtes durées sans surchauffer le pilote.
Ce produit peut devenir suffisamment chaud pour vous brûler bien avant que la puce ne surchauffe. Soyez prudent lorsque vous manipulez ce produit et les autres composants qui y sont connectés.
Veuillez noter that mesurer la consommation de courant au niveau de l'alimentation ne fournira généralement pas une mesure précise du courant de la bobine. Étant donné que la tension d'entrée du pilote peut être nettement supérieure à la tension de la bobine, le courant mesuré sur l'alimentation peut être un peu inférieur au courant de la bobine (le pilote et la bobine agissent essentiellement comme une alimentation à découpage). De plus, si la tension d'alimentation est très élevée par rapport à what le moteur doit atteindre le courant défini, le rapport cyclique sera très faible, ce qui entraîne également des différences importantes entre les courants moyens et efficaces.
Diagramme schématique
AMIS-30543 Schéma du transporteur du moteur pas à pas.
Plus d'Infos
| Poids | 0,05 kg |
|---|---|
| Dimensions | 5 × 1 × 3 cm |
| MARQUE | pololu |