





Dual TB9051FTG Motortreiber für Raspberry Pi (Gebaut)
23,00 €
Benachrichtigen Sie mich, wenn der Artikel verfügbar ist.
- Beschreibung
- Zusätzliche Informationen
Beschreibung
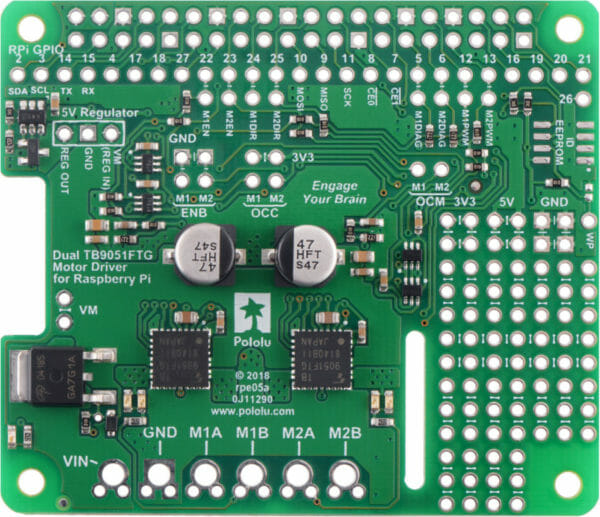
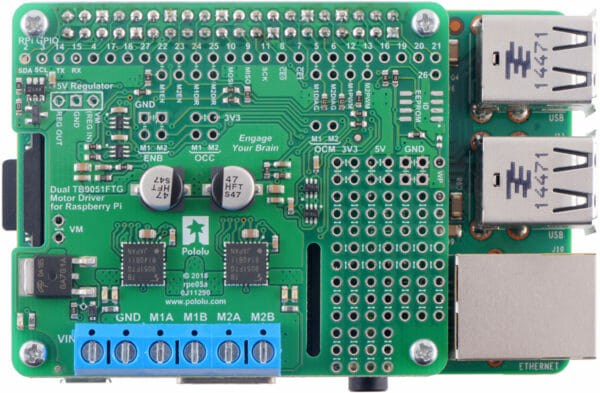
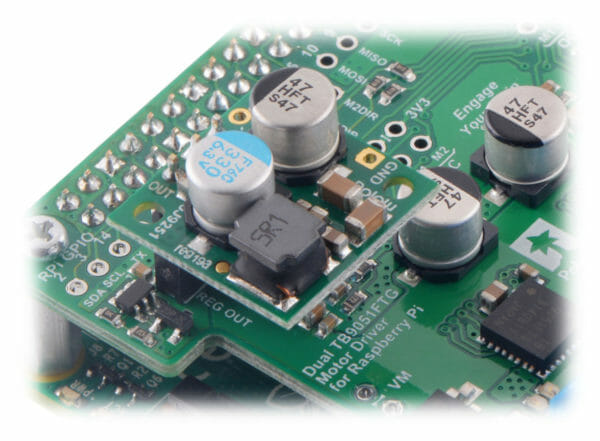
Dieses Zusatzboard ermöglicht ein Raspberry Pi B+, Pi A+, Pi 2 oder Pi 3 zum Antrieb eines Paars bürstenbehafteter Gleichstrommotoren. Seine dualen TB9051FTG-Motortreiber arbeiten von 4.5 V bis 28 V und können kontinuierlich 2.6 A (5 A Spitze) pro Motor liefern. Die Standard-Pin-Zuordnungen erleichtern den Einstieg in die Verwendung unserer mitgelieferten Software, aber das Board macht auch die meisten I / O-Pins der Treiberchips für speziellere Anwendungen verfügbar. Diese Version wird ausgeliefert fertig montiert mit eingelöteten Steckern.
Diese Motortreiber-Erweiterungsplatine und die entsprechende Python-Bibliothek machen es einfach, ein Paar bidirektionaler, bürstenbehafteter Gleichstrommotoren mit einem kompatiblen Raspberry Pi (Modell B + oder neuer), einschließlich der Pi 3 Modell B + und Modell A +. Die Erweiterungsplatine verwendet ein Paar Toshiba TB9051FTG-Motortreiber, die mit 4.5 bis 28 V arbeiten und kontinuierlich 2.6 A pro Kanal liefern können (bis zu 5 A pro Kanal für einige Sekunden). Weitere Merkmale sind eine Verpolungsschutzschaltung und Logikgatter that Reduzieren Sie die Anzahl der I / O-Pins, die erforderlich sind, um die Treiber-ICs effektiv zu steuern. Es ist entweder als Teilkit, mit Buchsenleiste und Klemmleisten enthalten, aber nicht eingelötet, oder fertig montiert mit diesen Steckverbindern auf die Platine gelötet.
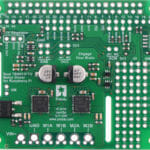
Die Standardkonfiguration des Boards verwendet sechs GPIO-Pins, um die Motortreiber zu steuern Raspberry Pis Hardware-PWM-Ausgänge und verwendet zwei zusätzliche Pins, um Statusausgänge von den Treibern zu lesen. Die Pin-Zuordnungen können jedoch angepasst werden, wenn die Standardeinstellungen nicht geeignet sind, und andere Steuereingänge und -ausgänge der TB9051FTG-ICs sind für erweiterte Anwendungen auf der Platine zugänglich.
 |
Das Brett passt zum Raspberry Pi HAT (Hardware Attached on Top) mechanische Spezifikation, obwohl sie nicht den vollständigen Spezifikationen entspricht HAT Spezifikationen aufgrund des Fehlens eines ID-EEPROM. (Ein Footprint zum Hinzufügen eines eigenen EEPROM ist für Anwendungen verfügbar, bei denen eine nützlich wäre. Es werden Pull-ups für SDA, SCL und WP bereitgestellt.) nicht Praktisch, um diese Erweiterungskarte mit dem Original zu verwenden Raspberry Pi Modell A oder Modell B aufgrund unterschiedlicher Pinbelegung und Formfaktor.
Zur Ansteuerung von Motoren höherer Leistung mit a Raspberry Pi, bedenke unsere Duale G2 Hochleistungs-Motortreiber-Erweiterungskarten, und für die Steuerung von Motoren mit geringerer Leistung mit einer kleineren Platine beachten Sie unsere DRV8835 Dual-Motor-Treiber or MAX14870 Dual-Motor-Treiber Bausätze. Wir haben auch ein ähnliches doppelter TB9051FTG-Schild für Arduinos und Arduino-kompatible Boards und ein Basic einzelner TB9051-Träger für diejenigen, die einen anderen Controller verwenden oder mit engeren Platzverhältnissen.
Eigenschaften
- Zweikanaliger H-Brücken-Motortreiber im Formfaktor a Raspberry Pi Erweiterungskarte
- Großer Betriebsspannungsbereich: 4.5 V bis 28 V
- Ausgangsstrom: 2.6 A kontinuierlich (5 A Spitze) pro Motor
- Die automatische Stromabschneidefunktion hilft, Überhitzung zu vermeiden, indem sie die Leistung elegant reduziert, anstatt sie abrupt abzuschalten
- PWM-Betrieb bis 20 kHz, Ultraschall und leiser Motorbetrieb
- Motoranzeige-LEDs zeigen what Die Ausgänge funktionieren auch dann, wenn kein Motor angeschlossen ist
- Board kann optional mit Strom versorgen Raspberry Pi Basis durch zusätzlichen Regler wie der D24V10F5 or D24V22F5 (nicht enthalten)
- Python-Bibliothek erleichtert den Einstieg in die Verwendung dieser Karte als Motortreiber-Erweiterungskarte
- GPIO-Pin-Zuordnungen können angepasst werden, wenn die Standardzuordnungen nicht geeignet sind
- Die verbleibenden Motortreiberstifte sind für den erweiterten Gebrauch freigelegt
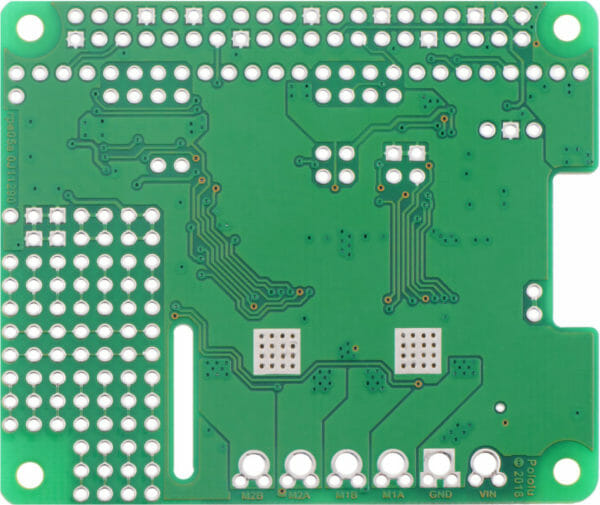
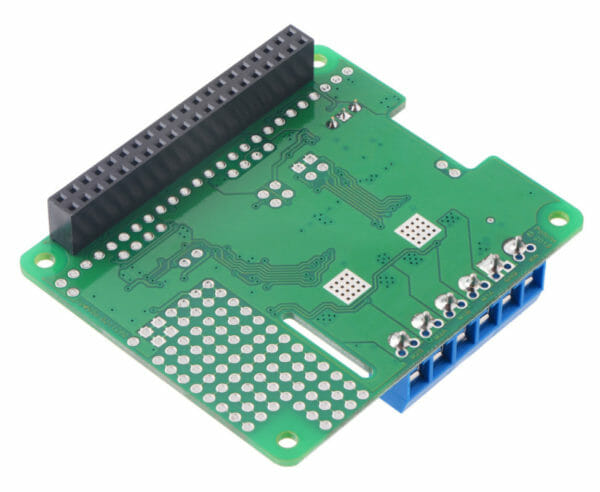
- Freiliegende lötbare Massepads unter den Treiber-ICs auf der Unterseite der Platine
- Verpolungsschutz an der Motorversorgung
- Robuste Fahrer:
- Transienter Betrieb (<500 ms) bis 40 V
- Unterspannungssperre und Schutz gegen Überstrom / Kurzschluss und Übertemperatur
- Active-Low-Fehlerausgang zeigt Überstrom, Übertemperatur, Unterspannung oder VCC-Überspannungszustand an
- Prototyping-Raum für einfachere / sauberere Konstruktion von kundenspezifischen Schaltungen
Details zum Artikel #2762
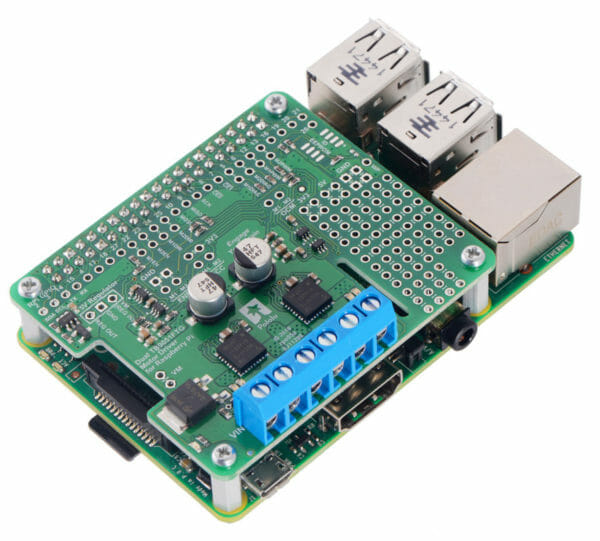
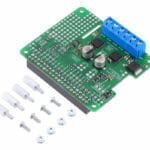
Diese Version des Motortreibers ist fertig montiert, Mit 2 × 20-poliger 0.1-Zoll-Buchsenkopf (zum Anschließen an die Raspberry Pi40-Pin-GPIO-Header) und eine XNUMX-Pin-Leiste von 5 mm Klemmenblöcke (für Motor- und Leistungsanschlüsse) eingelötet. (Wenn es Artikel # 2761 für eine Kit-Version mit mitgelieferten, aber nicht eingelöteten Steckern.)
 |
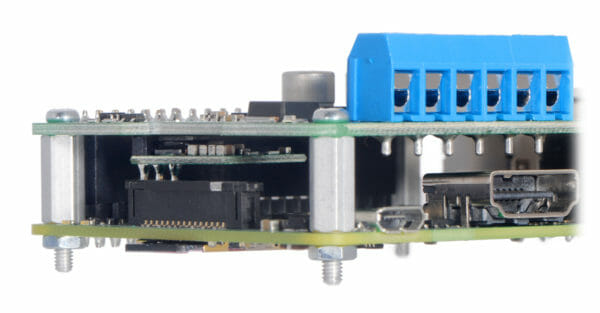
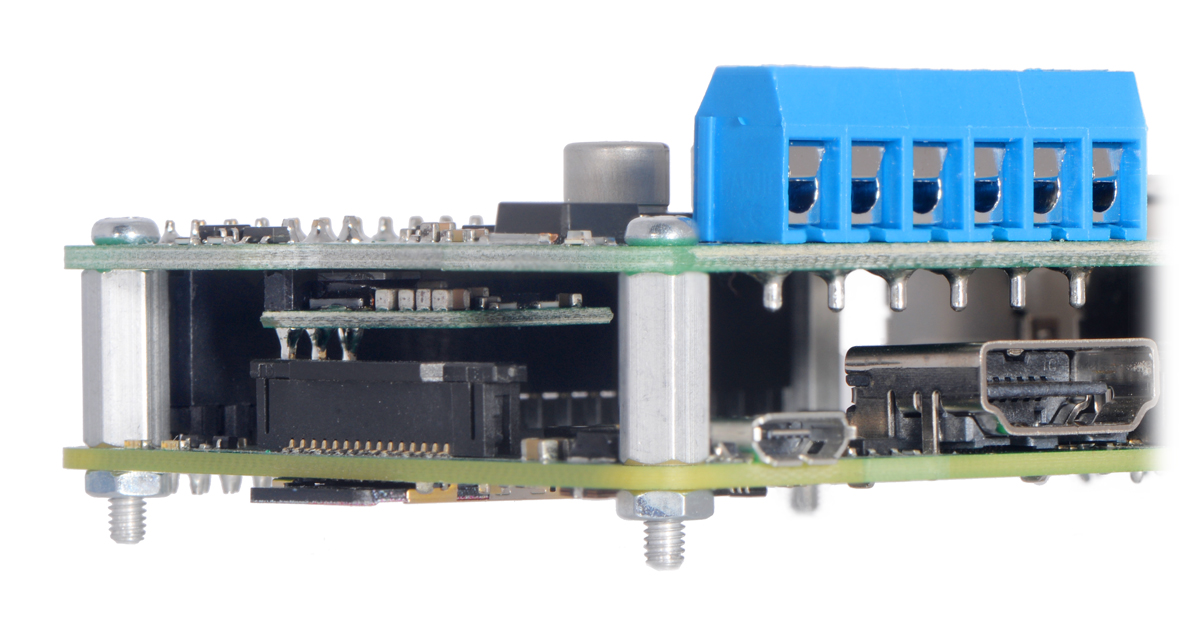
Der Motortreiber wird mit einem Satz von vier geliefert M2.5-Abstandshalter (11 mm Länge), Schrauben und Nüsse that kann verwendet werden, um die Platine an der Raspberry Pi auf der richtigen Höhe für den GPIO-Anschluss. Wenn Sie die Abstandshalter nicht verwenden möchten, achten Sie darauf, dass der Motor und die Stromanschlüsse nicht kurzgeschlossen werden Raspberry Pis HDMI-Anschluss.
Kurzschlussblöcke und 0.1 "schlechte Header (nicht im Lieferumfang enthalten) kann verwendet werden, um einige der fortgeschritteneren optionalen Modifikationen an der Platine vorzunehmen, wie z. B. die Neuzuordnung der Steuerpins.
A Raspberry Pi is nicht enthalten.
Verwenden der Motortreiberplatine
In diesem Abschnitt wird die Verwendung der Dual-TB9051FTG-Motortreiber-Add-On-Platine erklärt und einige grundlegende Informationen zu den Motortreiber-Pins bereitgestellt, um Ihnen den Einstieg zu erleichtern. Wir empfehlen Ihnen jedoch dringend, die TB9051FTG Datenblatt (2 MB pdf) für detaillierte Pinbeschreibungen, Wahrheitstabellen und elektrische Eigenschaften. Diese Erweiterungsplatine ist im Wesentlichen eine Breakout-Platine für zwei TB9051FTG-Motortreiber-ICs mit zusätzlicher Logikschaltung zur Vereinfachung der Motorsteuerung. Daher ist das Datenblatt Ihre beste Quelle für die Beantwortung von Fragen, die hier nicht behandelt werden.
 |
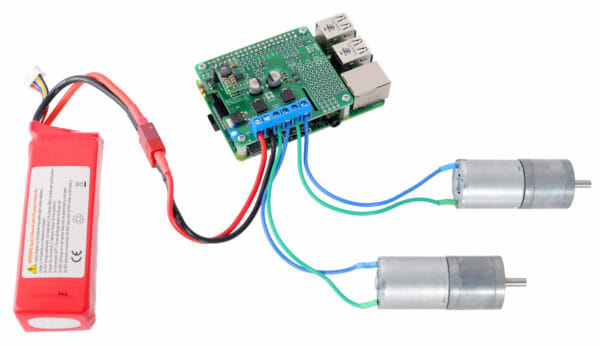
Im Grundzustand der Platine sind die Motortreiberausgänge und die Raspberry Pi werden separat mit Strom versorgt, obwohl sie eine gemeinsame Masse haben. Die 3.3-V- und 5-V-Logikversorgung des Boards werden von der Raspberry Pi. Bei dieser Verwendung wird die Raspberry Pi muss über seine USB Micro-B-Buchse mit Strom versorgt werden und die Motortreiberplatine muss über die großen VIN- und GND-Pads mit 4.5 V bis 28 V versorgt werden. Die Motortreiberplatine bietet jedoch einen Satz von drei Durchgangslöchern, an denen Sie bequem einen geeigneten Spannungsregler anschließen können, sodass die Motorversorgung auch den Strom versorgt Raspberry Pi (Siehe Einschalten des Raspberry Pi von der Motortreiberplatine Abschnitt unten).
Eine Verpolungsschutzschaltung verhindert Schäden an der Platine in case die Motorstromversorgung ist verkehrt herum angeschlossen. Über die beiden mit VM gekennzeichneten Pins auf der linken Seite der Platine kann auf die verpolungsgeschützte Eingangsspannung zur Verwendung in anderen Schaltungen zugegriffen werden.
Die Platine enthält Logikgatter that ermöglichen den Fahr-/Bremsbetrieb der TB9051FTG-Treiber mit nur zwei Steuerpins pro Motor (PWM und Richtung). Da der Fahr-/Bremsbetrieb in der Regel eine linearere Beziehung zwischen PWM-Tastverhältnis und Motordrehzahl bietet als Fahr-/Freilaufbetrieb, empfehlen wir generell, nach Möglichkeit den Fahr-/Bremsbetrieb zu verwenden.
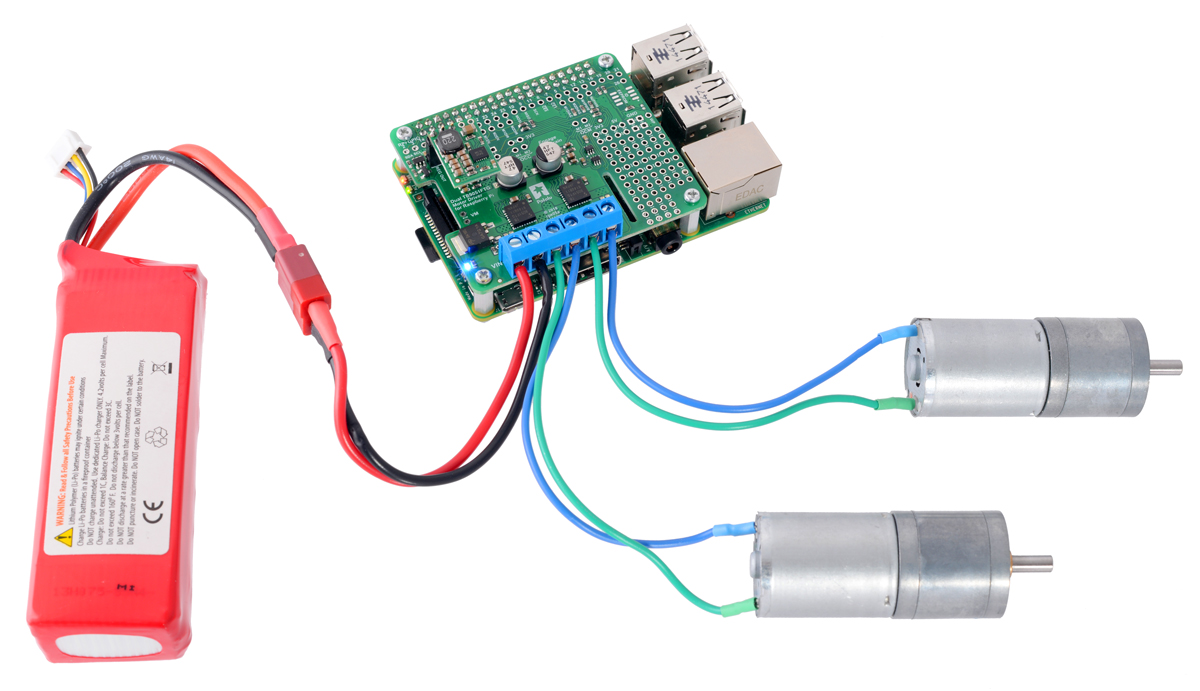 |
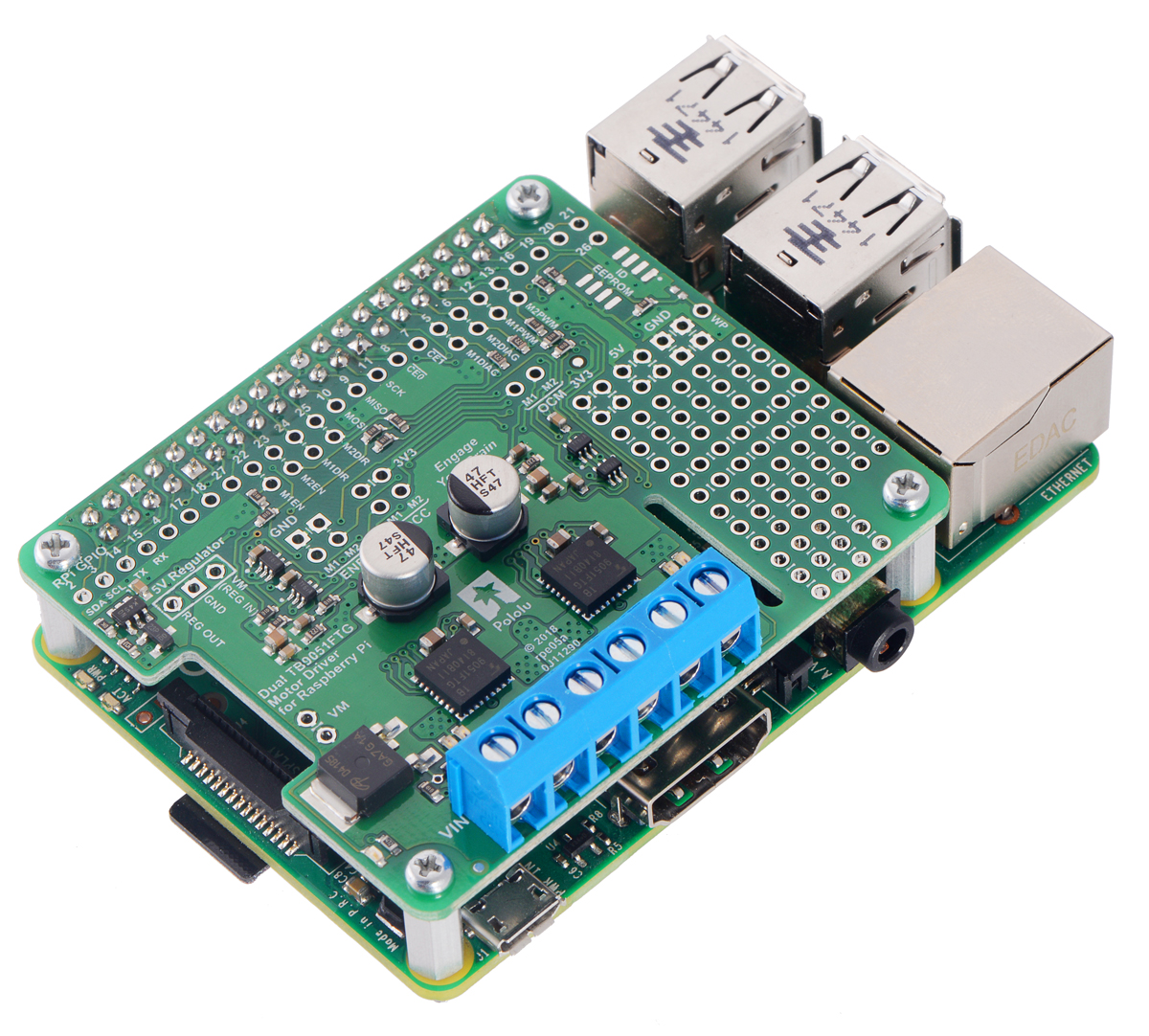
| Dual TB9051FTG Motortreiber für Raspberry Pi Steuerung eines Motorenpaares. |
|---|
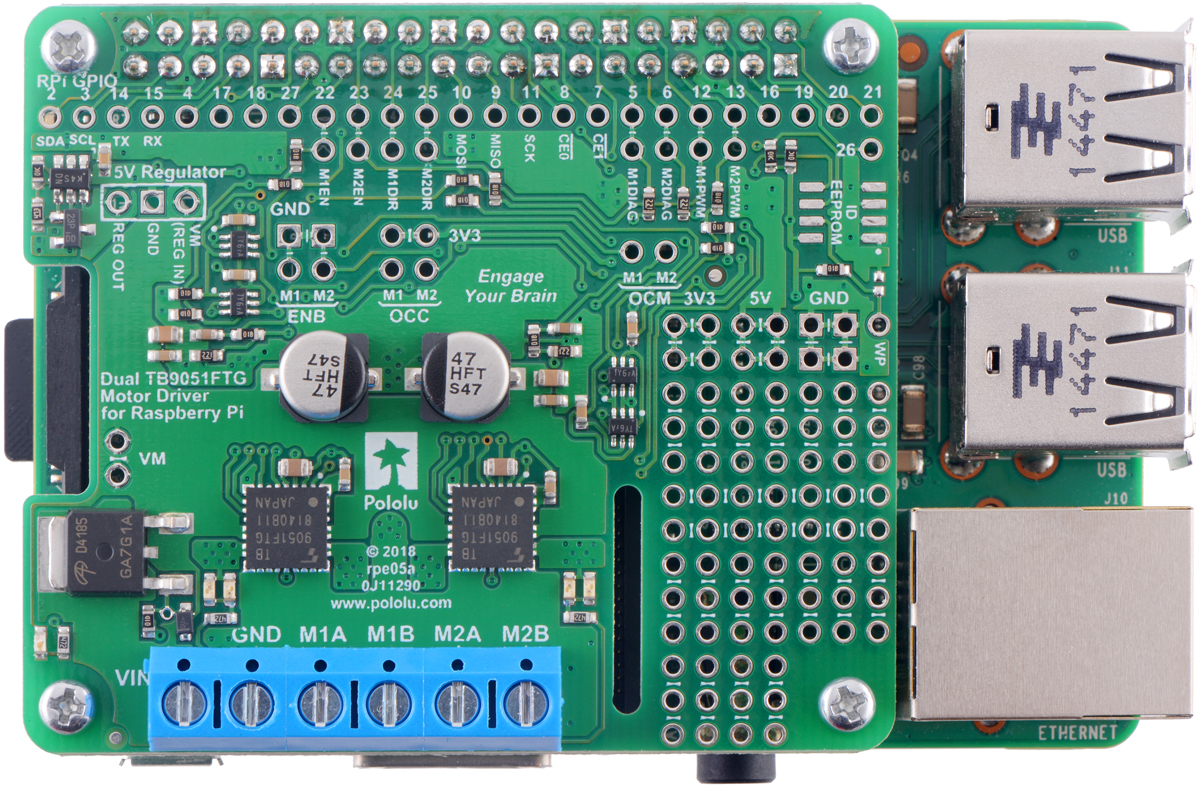
Standard-Pin-Zuordnungen
Diese Tabelle zeigt, wie die Raspberry PiGPIO-Pins werden verwendet, um mit den Motortreibern zu kommunizieren:
| RPi GPIO-Pin |
Motortreiberstift | Beschreibung |
|---|---|---|
| 5 | Motor 1 DIAG | Diagnosefehlerausgang: Wenn der Treiber normal funktioniert, sollte dieser Pin vom hochgezogen werden Raspberry Pi. Im Falle eines Treiberfehlers steuert der Treiber-IC DIAG auf Low. Wenn einer der Deaktivierungspins (EN oder ENB) die Ausgänge deaktiviert, ist DIAG ebenfalls niedrig. |
| 6 | Motor 2 DIAG | |
| 12 | PWM-Motor 1 | Motordrehzahleingang: Ein PWM-Signal (Pulsweitenmodulation) an diesem Pin entspricht einem PWM-Ausgang an den Motorausgängen des entsprechenden Treibers. Wenn dieser Pin niedrig ist, bremst der Motor niedrig. Wenn es hoch ist, ist der Motor eingeschaltet. Die maximal zulässige PWM-Frequenz beträgt 20 kHz. |
| 13 | PWM-Motor 2 | |
| 22 | Motor 1 DE | Eingabe aktivieren: Die Raspberry Pi zieht diesen Pin standardmäßig auf Low und deaktiviert die Motorausgänge, indem sie auf eine hohe Impedanz gesetzt werden. EN muss hoch angesteuert werden, um den Motortreiber zu aktivieren. |
| 23 | Motor 2 DE | |
| 24 | Motor 1 RICHT | Eingang Motorrichtung: Wenn DIR niedrig ist, fließt der Motorstrom von Ausgang A zu Ausgang B; wenn DIR hoch ist, fließt Strom von B nach A. |
| 25 | Motor 2 RICHT |
Vereinfachte Wahrheitstabelle der Motorsteuerung
Diese Tabelle zeigt, wie sich die Steuereingänge der Treiber auf die Motorausgänge auswirken:
| Eingänge | Ausgänge | ||||
|---|---|---|---|---|---|
| EN | DIR | PWM | MxA | MxB | Betriebsmodus |
| 1 | 0 | PWM | PWM (H/L) | L | vorwärts / mit Geschwindigkeit bremsen PWM% |
| 1 | 1 | PWM | L | PWM (H/L) | Rückwärts / Bremsen mit Geschwindigkeit PWM% |
| 1 | X | 0 | L | L | Bremse niedrig (Ausgänge gegen Masse kurzgeschlossen) |
| 0 | X | X | Z | Z | Leerlauf (Ausgänge aus) |
Pins neu zuordnen
Alle der Raspberry PiDie GPIO-Pins von GPIO sind entlang einer Reihe nummerierter Durchgangslöcher direkt unter dem 40-Pin-GPIO-Anschluss herausgebrochen. Jeder von der Platine verwendete GPIO-Pin ist von dieser Reihe aus mit dem entsprechenden Motortreiber-Pin durch eine Spur auf der Oberseite der Platine verbunden, die das Lochpaar überspannt. Wenn Sie einen dieser Motortreiber-Pins neu zuordnen möchten, können Sie seine Spur mit einem Messer abschneiden und dann einen Draht vom unteren Loch zu einem neuen GPIO-Pin führen.
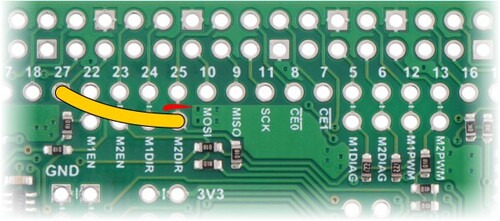 |
| Dual TB9051FTG Motortreiber für Raspberry Pi Beispiel für eine Neuzuordnung: Verschieben von M2DIR von GPIO-Pin 25 auf Pin 27. |
|---|
Anmerkungen that die Standard-Pin-Zuordnungen wurden so gewählt, dasshat Raspberry PiDie standardmäßigen GPIO-Pull-Ups und -Pull-Downs stimmen mit der Richtung überein, in die die Motortreiberpins gezogen werden oder gezogen werden sollten (nach oben für DIAG, nach unten für andere); Wenn Sie die Motortreiberpins neu zuordnen, ohne dies zu beachten, können Probleme mit falsch gezogenen Pins auftreten. Siehe die Raspberry Pi Dokumentation Weitere Informationen zu den Standard-GPIO-Zuständen.
Verwendung zusätzlicher TB9051FTG-Pins
Die restlichen Ein- und Ausgänge des TB9051FTG sind nicht mit dem Raspberry Pi, aber sie sind durch ihre eigenen Durchgangslöcher in case Sie sie in einer fortgeschritteneren Anwendung der Motortreiber verwenden möchten. Die Platine bindet einige der Eingänge hoch oder niedrig durch schneidbare Leiterbahnen, ähnlich wie die neu zuordenbaren Pins verbunden sind, und Sie sollten die Leiterbahn abschneiden, bevor Sie jeden Eingang mit etwas anderem verbinden. Diese Tabelle zeigt die Standardkonfiguration der zusätzlichen Pins:
| Motortreiberstift | Beschreibung | Standardkonfiguration an Bord |
|---|---|---|
| ENB | Invertierter Freigabeeingang | Niedrig gebunden (aktiviert) durch schneidbare Spur |
| OCC | Eingang zur Konfiguration der Überstromreaktion | Intern auf Low gezogen (Treiber bleibt nach Überstrom deaktiviert) |
| CMO | Strommonitorausgang | Verbunden mit Sense-Widerstand und Tiefpassfilter, um ca. 500 mV / A (nur aktiv während H-Brücke ansteuert) durch einen integrierten RC-Filter |
Weitere Informationen zu diesen Pins und ihrer Verwendung finden Sie im TB9051FTG Datenblatt (2MB pdf).
Einschalten des Raspberry Pi von der Motortreiberplatine
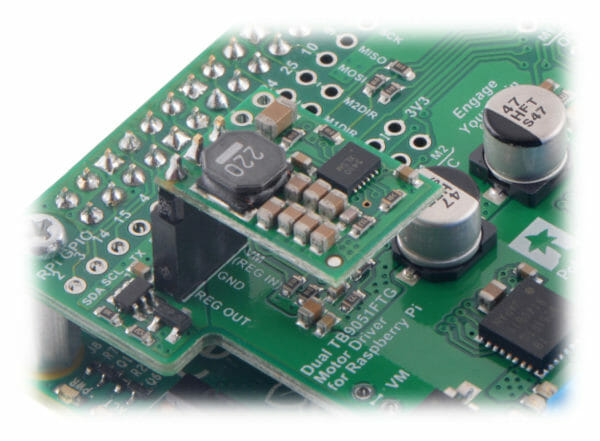
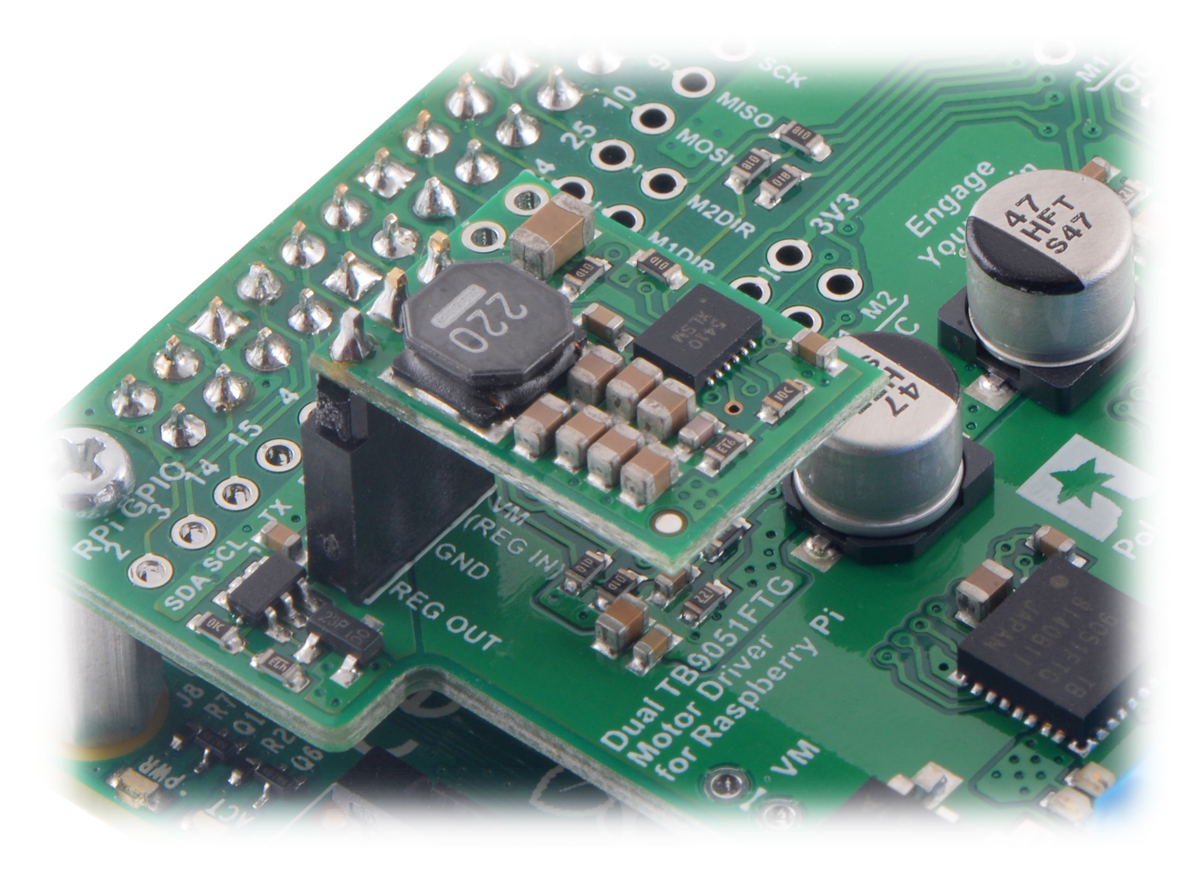
Auf der linken Seite der Erweiterungsplatine befindet sich ein Satz von drei Pins, umgeben von einer Box mit der Aufschrift „5V Regulator“. Der "VM (REG IN)"-Pin bietet nach dem Verpolungsschutz Zugriff auf die Motorversorgungsspannung der Treiberplatine, während der "REG OUT"-Pin mit dem Raspberry Pi's 5V Stromschiene durch eine ideale Diodenschaltung. Wenn an diesen drei Pins ein geeigneter Spannungsregler angeschlossen ist, kann dieser 5 V zur Stromversorgung des Raspberry Pi von der Motorversorgungsspannung der Platine.
Wir empfehlen die Verwendung unserer D24V10F5 or D24V22F5, die bei Eingangsspannungen arbeiten, die das Maximum von 28 V des TB9051FTG überschreiten (Einzelheiten zur Auswahl siehe unten) und bis zu 500 mA bzw. 1 A Strom an die Raspberry Pi.
Achten Sie beim Hinzufügen eines Spannungsreglers zur Motortreiberplatine auf die richtige Ausrichtung: Hinweis that Der "VM (REG IN)"-Pin der Motortreiberplatine sollte mit dem VIN-Pin des Reglers verbunden werden, während der VOUT-Pin des Reglers mit dem REG OUT-Pin der Motortreiberplatine verbunden werden sollte.
Es gibt einige Überlegungen, die Sie beim „Back-Powering“ der Raspberry Pi durch einen Spannungsregler auf diese Weise:
- Ihre Motorstromversorgung muss sowohl für den Regler als auch für die TB9051FTG-Treiber-ICs eine akzeptable Spannung aufweisen.
- Der Regler sollte in der Lage sein, den Strombedarf des Raspberry Pi. Das Model B+ verbraucht typischerweise einige hundert Milliampere bei 5 V, obwohl seine Stromaufnahme 1 A überschreiten kann, wenn es auch USB-Geräte und andere Peripheriegeräte mit Strom versorgt. Ein Linearregler wie ein 7805 könnte zwar in den Montageort des Reglers passen, er kann jedoch bei höheren Eingangsspannungen und Ausgangsströmen übermäßige Hitze erzeugen oder abschalten. Wir empfehlen die Verwendung eines Schaltreglers wie den oben genannten.
Die ideale Diodenschaltung auf dieser Platine verhindert, dass Rückstrom in die 5-V-Versorgung der Motortreiberplatine fließt, wenn die Raspberry Pi wird separat mit Strom versorgt (z. B. über die USB-Steckdose). Beginnend mit dem Raspberry Pi 3 Modell B +, es gibt keine entsprechende ideale Diodenschaltung auf dem Raspberry Pi's USB-Stromeingang, sodass die Treiberplatine ein USB-Netzteil über die Raspberry Pi. Als Ergebnis, Wir empfehlen nicht, eine externe USB-Stromversorgung anzuschließen zu den Raspberry Pi während es über den Motortreiber mit Strom versorgt wird.
Rückfütterung ist kein Problem mit älteren Raspberry Pi Versionen, die eine Diodenschaltung am USB-Stromeingang haben. Mit Raspberry Pi Versionen vor dem Pi 3 B + ist es sicher, ein anderes Netzteil an das Raspberry Pi über seine USB-Buchse, während das Motortreiber-Add-On und der Regler angeschlossen und mit Strom versorgt werden.
Das D24V10F5 kann bis zu 1 A Strom an die Raspberry Pi und sollte für Modelle mit geringerer Leistung funktionieren (wie die A+) bei leichteren Lasten. Es kann mit a . direkt an die Motortreiberplatine gelötet werden männlicher Header um eine kompakte, dauerhafte Verbindung herzustellen:
|
|

oder eingesteckt in a 3-polige Buchsenleiste für einen modulareren Aufbau an die Platine gelötet:
 |
Das D24V22F5 kann bis zu 2.5 A liefern und ist eher für höhere Leistungen geeignet Raspberry Pi Modelle (wie die Pi 3 B +), insbesondere bei anspruchsvollen Workloads oder bei der Stromversorgung vieler Peripheriegeräte. Aufgrund seiner größeren Abmessungen muss es über längere Stiftleisten oder Drähte angeschlossen werden, um eine Störung der Klemmenblöcke zu vermeiden.
 |
Die FAQ-Seite auf der Raspberry Pi Website hat mehr Informationen über Raspberry Pi Strombedarf.
Überlegungen zur tatsächlichen Verlustleistung
Der TB9051FTG beginnt seinen Ausgangsstrom bei einem typischen Schwellenwert von 6.5 A zu zerhacken. Der Chip selbst überhitzt jedoch normalerweise bei niedrigeren Strömen. In unseren Tests haben wir festgestellt, dass that der Chip konnte nur wenige Sekunden lang 5 A liefern, bevor der Wärmeschutz des Chips einsetzte; ein Dauerstrom von ca. 2.6 A pro Kanal war viele Minuten lang haltbar, ohne eine thermische Strombegrenzung oder eine Übertemperaturabschaltung auszulösen. Der tatsächliche Strom, den Sie liefern können, hängt davon ab, wie gut Sie den Motortreiber kühl halten können. Die Leiterplatte des Treibers soll dabei helfen, indem sie Wärme aus dem Motortreiberchip ableitet. Die PWM-Steuerung des Motors führt proportional zur Frequenz zu einer zusätzlichen Erwärmung.
Im Gegensatz zu typischen H-Brücken verfügt der TB9051FTG über eine Funktion, diehat ermöglicht es, die maximale Stromgrenze elegant zu reduzieren, wenn sich die Chiptemperatur ihrer Grenze nähert. Dies bedeutet,hat Wenn Sie den Chip nahe an seine Grenze bringen, wird der Motor weniger belastet, aber möglicherweise können Sie ein vollständiges Herunterfahren vermeiden.
Dieses Produkt kann bekommen heiß genug, um Sie zu verbrennen, lange bevor der Chip überhitzt. Seien Sie vorsichtig beim Umgang mit diesem Produkt und anderen damit verbundenen Komponenten.
Schematische Darstellung
 |
Dieses Diagramm ist auch als herunterladbares pdf verfügbar: Dual TB9051FTG Motortreiber für Raspberry Pi schematisch (269k pdf).
Zusätzliche Informationen
| MARKE | Pololu |
|---|---|
| MERKMALE |