


AMIS-30543 Schrittmotortreiber
20,99 €
- Beschreibung
- Zusätzliche Informationen
Beschreibung
Dieses Produkt ist eine Trägerplatine oder Breakout-Platine für den Mikroschrittmotortreiber AMIS-30543 von ON Semiconductor; Wir empfehlen daher, das Datenblatt AMIS-30543 (495k pdf) sorgfältig zu lesen, bevor Sie dieses Produkt verwenden. Mit diesem Schrittmotortreiber können Sie einen bipolaren Schrittmotor mit bis zu 3 A Ausgangsstrom pro Spule steuern (weitere Informationen finden Sie im Abschnitt Überlegungen zur Verlustleistung weiter unten). Hier sind einige der wichtigsten Funktionen des Boards:
Standard Schnittstelle für Schritt- und Richtungssteuerung
SPI-Schnittstelle zur Konfiguration von Einstellungen (z. B. Schrittmodus, Strombegrenzung, Ruhezustand) und zum Lesen von Statusregistern
Geschwindigkeits- und Lastwinkelausgang that kann zur Blockiererkennung oder zur Regelung des Drehmoments und der Drehzahl basierend auf dem Lastwinkel verwendet werden
Elf verschiedene Schrittmodi: Vollschritt (unkompensierte, kompensierte 1-Phase oder kompensierte 2-Phase), Halbschritt (unkompensierte oder kompensierte), 1 / 4-Schritt, 1 / 8-Schritt, 1 / 16-Schritt, 1 / 32-Schritt, 1 / 64-Schritt und 1 / 128-Schritt
Mit der SPI-programmierbaren Stromregelung (von 132 mA bis 3 A) kann Ihr Mikrocontroller die Spitzenstromgrenze im laufenden Betrieb anpassen, wenn mehr oder weniger Drehmoment oder Drehzahl erforderlich sind
Intelligente Hacksteuerung that wählt automatisch den richtigen aktuellen Abklingmodus aus (schneller oder langsamer Abfall)
Low-EMI-PWM mit SPI-wählbaren Spannungsflanken
Kompatibel mit 5V- und 3.3V-Mikrocontrollern
Integrierter 5V Regler that kann zur Versorgung eines externen Mikrocontrollers verwendet werden
Integrierte Watchdog-Funktion
Spulenerkennung öffnen
Thermische Warnung zeigt an, wenn sich der Fahrer der thermischen Abschalttemperatur nähert
Überstromzustand und Abschaltung (Kurzschluss- und Kurzschlussschutz)
Verpolungsschutz
Hinweis: Dieser Treiber muss beim Einschalten über seine SPI-Schnittstelle aktiviert und konfiguriert werden, sodass Ihr Mikrocontroller in der Lage sein muss, als SPI-Master zu fungieren (entweder mit einem SPI-Peripheriegerät oder einem Software-SPI).
Enthaltene Hardware
Dieses Produkt wird mit allen oberflächenmontierbaren Komponenten geliefert, einschließlich des AMIS-30543-Treiber-ICs, die wie auf dem Produktbild gezeigt installiert werden. Für die Montage der mitgelieferten Durchgangslochteile ist jedoch Löten erforderlich. Folgende Durchgangslochteile sind im Lieferumfang enthalten:
Eine 1 × 20-polige Abreißsicherung 0.1? Steckerleiste
Drei 2-polige 3.5-mm-Klemmenblöcke (für Platinenstrom- und Motorausgänge)
Ein 0.1? Kurzschlussblock (zum Verbinden von IOREF mit dem benachbarten VDD-Pin)
Die 0.1? Stiftleiste kann nach Belieben gebrochen oder in kleinere Stücke geschnitten und in die kleineren Durchgangslöcher gelötet werden. Diese Header sind kompatibel mit lötfreien Steckplatinen, 0.1? Buchsenleisten und unsere hochwertigen und vorgecrimpten Überbrückungsdrähte. Die Klemmenblöcke können in die größeren Löcher gelötet werden, um bequeme temporäre Verbindungen von nicht abgeschlossenen Strom- und Schrittmotorkabeln zu ermöglichen. Sie können Ihre Motorkabel und andere Anschlüsse auch direkt an die Platine löten, um eine möglichst kompakte Installation zu erzielen.
Den Treiber benutzen
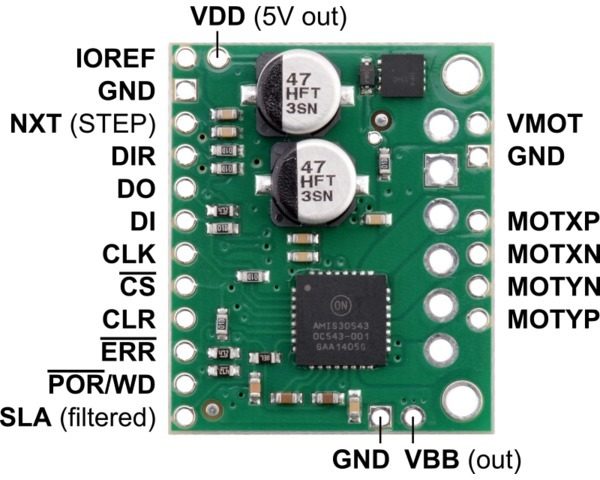
Pinout
PIN
Beschreibung
VMOT
Verpolungssicherer 6 V bis 30 V Bordnetzanschluss. Hinweis: Der verfügbare VDD-Strom wird für Eingangsspannungen unter 8 V reduziert und der Ruhemodus ist für Eingangsspannungen unter 9 V nicht verfügbar.
VBB
Dieser Pin ermöglicht den Zugriff auf die Motorstromversorgung nach dem Verpolungsschutz-MOSFET (siehe Schaltplan unten). Es kann verwendet werden, um andere Komponenten im System mit verpolungssicherer Spannung zu versorgen. Es ist im Allgemeinen als Ausgang gedacht, kann aber auch zur Stromversorgung der Platine verwendet werden.
GND
Erdungspunkte für die Motorstromversorgung und die Steuererdungsreferenz. Die Steuerquelle und der Motortreiber müssen eine gemeinsame Masse haben.
MOTXP
Motorleistung: ?Positiv? Ende der Phase-X-Spule.
MOTXN
Motorleistung: ?negativ? Ende der Phase-X-Spule.
MOTYP
Motorleistung: ?Positiv? Ende der Phase Y-Spule.
MOTYN
Motorleistung: ?negativ? Ende der Phase Y-Spule.
VDD (5V OUT)
Die Platine wird von einem internen 5-V-Regler gespeist, und dieser Pin ermöglicht den Zugriff auf den geregelten 5-V-Ausgang. Dies kann verwendet werden, um den benachbarten IOREF-Pin zu versorgen, wenn dieses Board in 5V-Systemen verwendet wird, und kann verwendet werden, um einen externen Mikrocontroller mit Strom zu versorgen. Bei VMOT über 8 V stehen ca. 30 mA für externe Komponenten zur Verfügung; wenn VMOT weniger als 8 V beträgt, sinkt der verfügbare Strom auf weniger als 10 mA.
IOREF
Alle Platinensignalausgänge (außer SLA) sind Open-Drain-Ausgänge that werden auf IOREF hochgezogen, daher sollte dieser Pin mit der Logikspannung des Steuersystems versorgt werden (z. B. 3.3 V zur Verwendung in 3.3 V-Systemen). Zur Vereinfachung kann es an den benachbarten VDD-Pin angeschlossen werden, wenn es in einem 5-V-System verwendet wird.
NXT
Änderungen an diesem Eingang verschieben den Motorstrom in der Übersetzertabelle um einen Schritt nach oben oder unten (auch wenn der Motor deaktiviert ist). Die Kante that Auslöser Der Schritt hängt vom Konfigurationsbit mit NXT-Polarität ab, das über die SPI-Schnittstelle geändert werden kann (standardmäßig steigende Flanke).
DIR
Eingabe that bestimmt die Drehrichtung. Die Richtung kann auch über die SPI-Schnittstelle gesteuert werden.
DO
SPI-Datenausgabe. (Dieser Pin wird auch oft als? MISO? bezeichnet.)
DI
SPI-Dateneingabe. (Dieser Pin wird auch oft als? MOSI? bezeichnet.)
CLK
SPI-Takteingang.
CS
SPI Chip Select Eingang. Logikübergänge an diesem Pin sind für die SPI-Kommunikation erforderlich, auch wenn dies das einzige Gerät am SPI-Bus ist.
CLR
Eingabe-Reset-Chip. Ein logischer High-Pegel an diesem Eingang löscht alle internen Register, außer im Ruhemodus.
ERR
Fehlerausgabe. Dieser Pin fährt niedrig, um t anzuzeigenhat Ein Fehlerzustand ist aufgetreten. Der spezifische Fehler kann mithilfe der SPI-Schnittstelle ermittelt werden, um die Fehlerflags zu überprüfen.
POR / WD
Power Reset Reset / Watch Dog Funktionsausgang. Dieser Pin liefert ein Aktiv-Niedrig-Signal that kann als Reset-Eingang für einen externen Mikrocontroller verwendet werden.
SLA (gefiltert)
SLA-Ausgabe (Geschwindigkeit und Lastwinkel) nach einem Tiefpassfilter. Das Ergebnis ist eine analoge Spannung zwischen 0 V und 5 V that zeigt die Höhe der Gegen-EMK-Spannung des Motors an. Dieses Signal kann zur Überbrückungserkennung oder zur Regelung von Drehmoment und Drehzahl in Abhängigkeit vom Lastwinkel verwendet werden. Hinweis: Da der Ausgang dieses Pins unabhängig von IOREF im Bereich von 0 V bis 5 V liegt, sollten zusätzliche Vorsichtsmaßnahmen getroffen werden, wenn dieser Pin an ein 3.3-V-Gerät angeschlossen wird (z. B. durch einen geeigneten Spannungsteiler).
Allgemeiner minimaler Schaltplan
Minimaler Schaltplan für den Anschluss eines Mikrocontrollers an einen AMIS-30543-Schrittmotortreiber.
Während der AMIS-30543 die Steuerung eines Schrittmotors über eine einfache Schritt- (NXT) und Richtungsschnittstelle (DIR) ermöglicht, muss er zuerst über seine SPI-Schnittstelle aktiviert und konfiguriert werden. Dies bedeutet that Der steuernde Mikrocontroller muss als SPI-Master fungieren können (entweder mit einem SPI-Peripheriegerät oder einem Software-SPI) und mit den DI-, CLK- und CS-Pins verbunden sein. Während die DO- und ERR-Pins für die Verwendung dieses Treibers nicht erforderlich sind, empfiehlt es sich im Allgemeinen, sie zur Überwachung auf Fehlerzustände zu verwenden.
Minimaler Schaltplan (nur 5-V-Systeme)
Minimaler Schaltplan zum Anschließen eines Mikrocontrollers mit einer logischen Spannung von 5 V an einen Schrittmotortreiber AMIS-30543.
Der AMIS-30543 verfügt über einen internen 5-V-Regler that kann verwendet werden, um IOREF in zu liefern cases wo die Karte in 5-V-Systemen verwendet wird. Dieser interne Regler kann auch verwendet werden, um die Logikspannung des externen Mikrocontrollers zu liefern, wenn der Regler den erforderlichen Strom liefern kann, in dem case Es würde eine Leitung vom AMIS-30543 VDD zum Mikrocontroller VDD im obigen Diagramm geben, und die ?Logik-Stromversorgung? Box wäre nicht dabei.
Arduino-Bibliothek und Beispielcode
Steuern eines AMIS-30543-Schrittmotortreibers mit einem Arduino-kompatiblen #3104 A-Star 32U4 Mini SV.
Wenn Sie mit AMIS-30543 oder Schrittmotoren im Allgemeinen noch nicht vertraut sind, kann Ihnen unsere Arduino-Bibliothek AMIS-30543 beim Einstieg helfen. Die Bibliothek stellt grundlegende Funktionen zur Konfiguration und Bedienung des Treibers mit einem Arduino oder Arduino-kompatiblen Controller bereit. Es bietet auch Zugriff auf viele der erweiterten Funktionen des Treibers und enthält Beispielskizzen zumhat zeigen Ihnen, wie man sie benutzt.
Überlegungen zur Verlustleistung
Der AMIS-30543-Treiber-IC hat eine maximale Stromstärke von 3 A pro Spule. Der tatsächliche Strom, den Sie liefern können, hängt jedoch davon ab, wie gut Sie den IC kühl halten können. Die Leiterplatte des Trägers ist so ausgelegt, dass sie dem IC Wärme entzieht. Um jedoch kontinuierlich mehr als ungefähr 1.8 A pro Spule zu liefern, ist ein Kühlkörper oder eine andere Kühlmethode erforderlich. Es ist jedoch möglich, die SPI-konfigurierbare Strombegrenzung zu verwenden, um selektiv höhere Ströme als diese für kurze Zeiträume zu liefern, ohne den Treiber zu überhitzen.
Dieses Produkt kann heiß genug werden, um Sie zu verbrennen, lange bevor der Chip überhitzt. Seien Sie beim Umgang mit diesem Produkt und anderen daran angeschlossenen Komponenten vorsichtig.
Bitte beachten Sie that Das Messen der Stromaufnahme an der Stromversorgung liefert im Allgemeinen kein genaues Maß für den Spulenstrom. Da die Eingangsspannung des Treibers erheblich höher sein kann als die Spulenspannung, kann der gemessene Strom an der Stromversorgung erheblich niedriger sein als der Spulenstrom (Treiber und Spule wirken grundsätzlich wie eine Schalt-Abwärtsstromversorgung). Auch wenn die Versorgungsspannung im Vergleich zu w sehr hoch isthat Wenn der Motor den eingestellten Strom erreichen muss, ist das Tastverhältnis sehr niedrig, was auch zu signifikanten Unterschieden zwischen Durchschnitts- und Effektivstrom führt.
Schematische Darstellung
Schaltplan des AMIS-30543-Schrittmotortreiberträgers.
Zusätzliche Informationen
| Gewicht | 0,05 kg |
|---|---|
| Abmessungen | 5 × 1 × 3 cm |
| MARKE | Pololu |